6.3.2 卷积基础
本节定位
卷积是 CNN 看图像的方式,它不会过早把空间结构压平成一长串数字。本页先看图,再手算卷积,最后用 nn.Conv2d 验证同样的概念。
学习目标
- 解释为什么太早 flatten 图像很浪费。
- 手算一个卷积输出值。
- 理解 kernel、stride、padding、channel 和 feature map。
- 用 PyTorch 验证输出 shape。
- 解释为什么堆叠卷积会扩大感受野。
先看滑动窗口
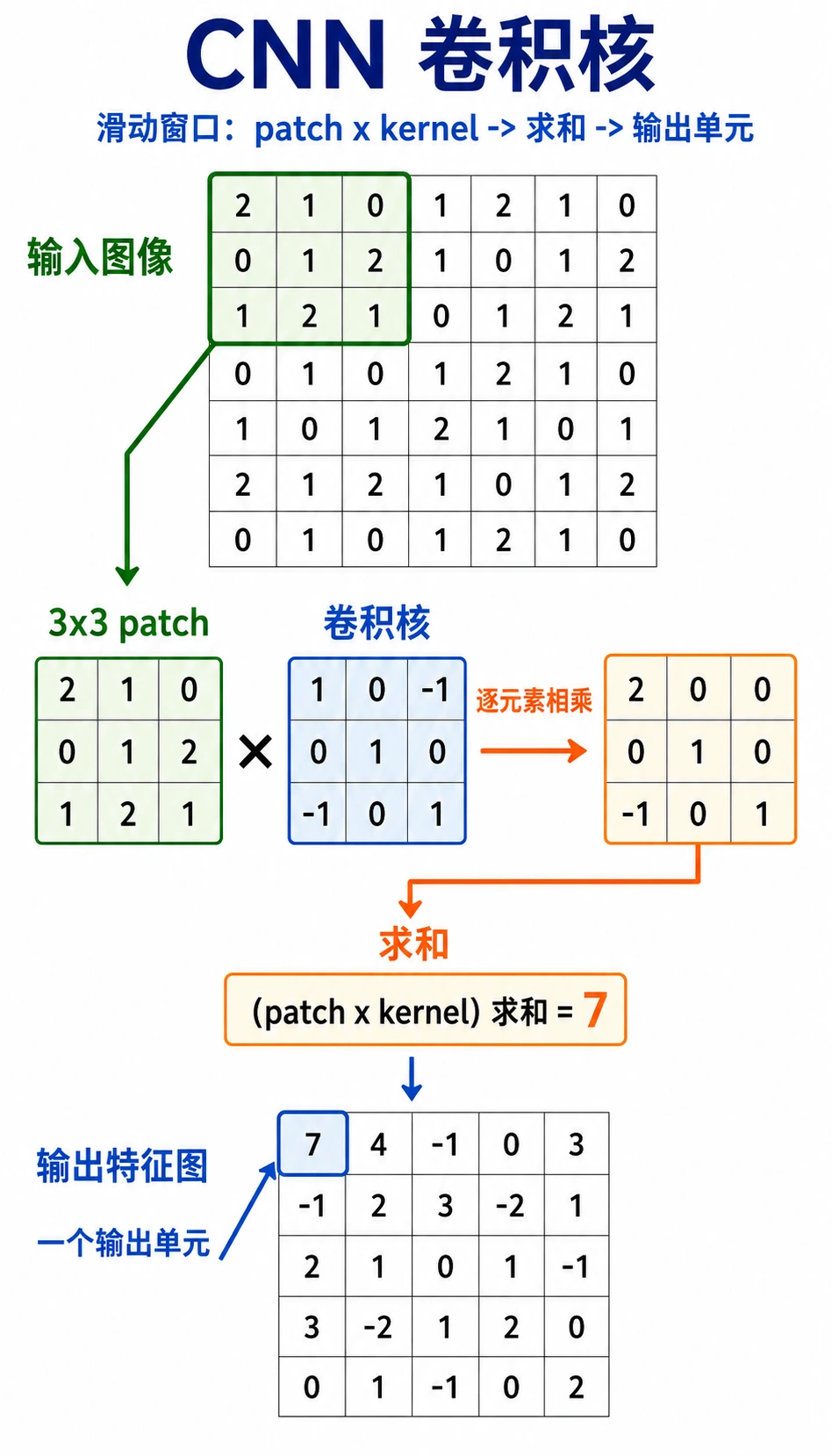
按这个顺序读图:
小窗口 -> 和 kernel 逐元素相乘 -> 求和 -> 一个输出值 -> 滑动并重复
卷积核就是一个小型模式检测器。它不是一次看完整张图,而是扫描局部区域,并把得分写进 feature map。
为什么不先把图像 flatten?
一张 32 x 32 灰度图有 1024 个像素。如果接一个输出为 512 的全连接层,需要:
1024 * 512 = 524288 个权重
一张 224 x 224 x 3 彩色图有 150528 个输入值。朴素全连接层参数会爆炸,而且会忽略像素的位置关系。
卷积解决两个问题:
| 过早 flatten 的问题 | 卷积的做法 |
|---|---|
| 附近像素的空间关系丢失 | 看局部窗口 |
| 每个位置都需要单独权重 | 同一个 kernel 到处复用 |
| 参数数量增长很快 | 在整张图上共享参数 |
两个核心术语:
- 局部连接:每个输出只看一小块区域;
- 参数共享:同一个 kernel 扫描多个位置。
实验 1:手算卷积
import numpy as np
image = np.array(
[
[1, 2, 0, 0],
[5, 3, 0, 4],
[2, 1, 3, 1],
[0, 2, 1, 2],
],
dtype=np.float32,
)
kernel = np.array(
[
[1, 0],
[0, -1],
],
dtype=np.float32,
)
out = np.zeros((3, 3), dtype=np.float32)
for i in range(3):
for j in range(3):
patch = image[i : i + 2, j : j + 2]
out[i, j] = np.sum(patch * kernel)
print("manual_conv_lab")
print(out)
预期输出:
manual_conv_lab
[[-2. 2. -4.]
[ 4. 0. -1.]
[ 0. 0. 1.]]
左上角输出值:
patch = [[1, 2],
[5, 3]]
kernel = [[ 1, 0],
[ 0, -1]]
score = 1*1 + 2*0 + 5*0 + 3*(-1) = -2
这就是卷积的核心计算。
实验 2:把 kernel 当边缘检测器
这个横向 kernel 会比较相邻像素从左到右的变化。
import numpy as np
image = np.array(
[
[0, 0, 0, 0, 0],
[0, 0, 1, 1, 1],
[0, 0, 1, 1, 1],
[0, 0, 1, 1, 1],
[0, 0, 0, 0, 0],
],
dtype=np.float32,
)
kernel = np.array([[-1, 1]], dtype=np.float32)
out = np.zeros((5, 4), dtype=np.float32)
for i in range(5):
for j in range(4):
patch = image[i : i + 1, j : j + 2]
out[i, j] = np.sum(patch * kernel)
print("edge_lab")
print(out)
预期输出:
edge_lab
[[0. 0. 0. 0.]
[0. 1. 0. 0.]
[0. 1. 0. 0.]
[0. 1. 0. 0.]
[0. 0. 0. 0.]]
1 出现在图像从 0 变成 1 的边界位置。这也是为什么早期 CNN 层经常学到类似边缘的滤波器。
Stride、Padding 和输出尺寸
| 术语 | 含义 | 影响 |
|---|---|---|
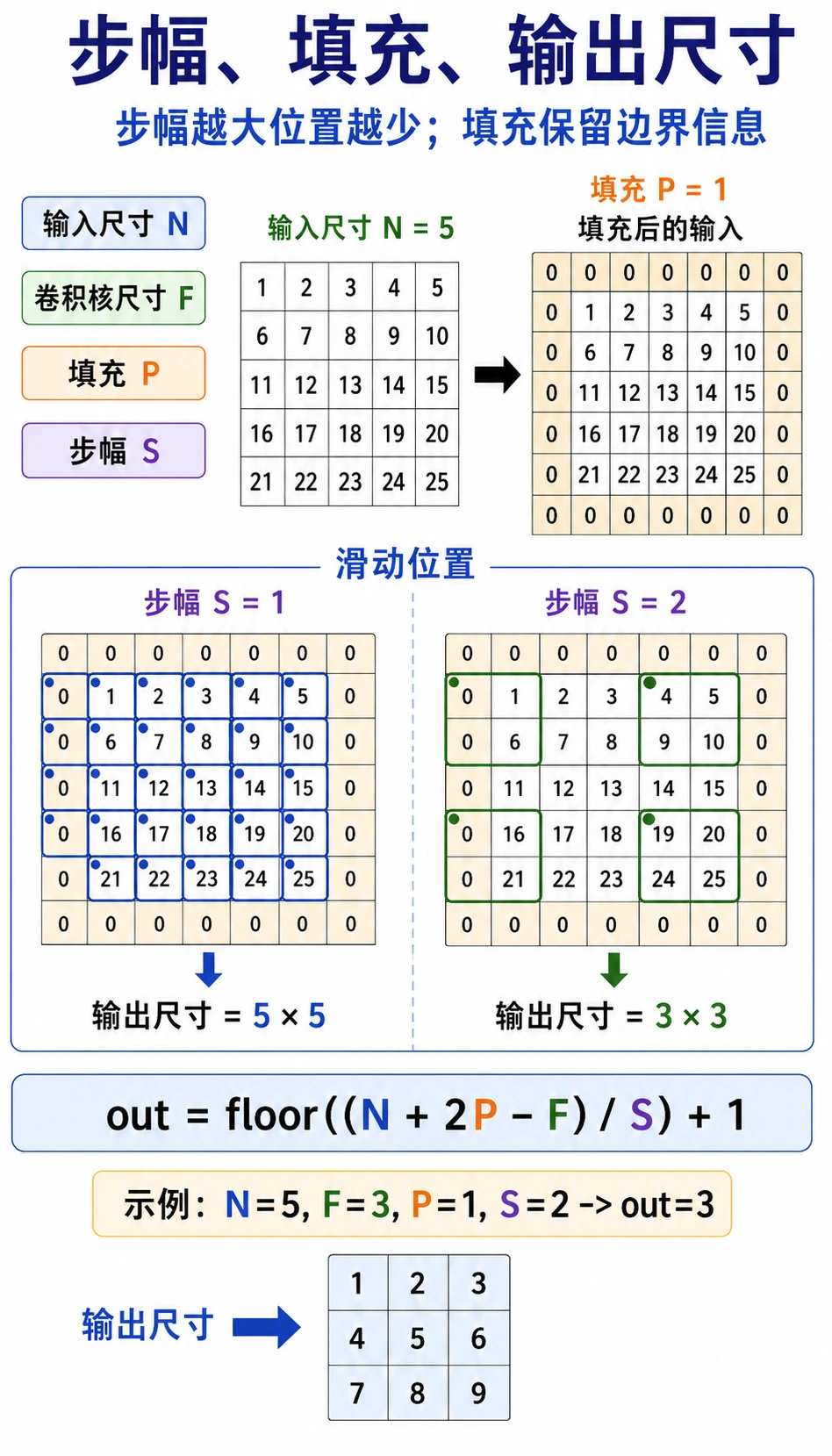
kernel_size | 窗口大小 | kernel 越大,看见的局部区域越大 |
stride | 每次移动多远 | stride 越大,输出越小 |
padding | 给输入周围加边框 | 保留边缘信息并控制尺寸 |
单个空间维度的输出尺寸:
output = floor((input + 2*padding - kernel_size) / stride) + 1
例子:
input=6, kernel_size=3, padding=1, stride=2
output = floor((6 + 2*1 - 3) / 2) + 1 = 3
用 PyTorch 验证:
import torch
from torch import nn
x = torch.randn(1, 1, 6, 6)
conv = nn.Conv2d(
in_channels=1,
out_channels=2,
kernel_size=3,
stride=2,
padding=1,
)
y = conv(x)
print("size_lab")
print("input:", tuple(x.shape))
print("output:", tuple(y.shape))
预期输出:
size_lab
input: (1, 1, 6, 6)
output: (1, 2, 3, 3)
shape 按 [batch, channels, height, width] 读。
多通道卷积
彩色图像有三个输入通道:红、绿、蓝。PyTorch 中一批 RGB 图像通常是:
[batch, 3, height, width]
RGB 图像上的 3 x 3 卷积核实际 shape 是:
[out_channels, in_channels, kernel_height, kernel_width]
运行:
import torch
from torch import nn
x = torch.randn(2, 3, 32, 32)
conv = nn.Conv2d(in_channels=3, out_channels=8, kernel_size=3, padding=1)
y = conv(x)
print("channel_lab")
print("input:", tuple(x.shape))
print("output:", tuple(y.shape))
print("weight:", tuple(conv.weight.shape))
print("bias:", tuple(conv.bias.shape))
预期输出:
channel_lab
input: (2, 3, 32, 32)
output: (2, 8, 32, 32)
weight: (8, 3, 3, 3)
bias: (8,)
解释:
2:batch 里有两张图;3:RGB 输入通道;8:八个学到的输出 feature map;(8, 3, 3, 3):八个 kernel,每个都看三个输入通道。
感受野:CNN 如何随深度看得更大
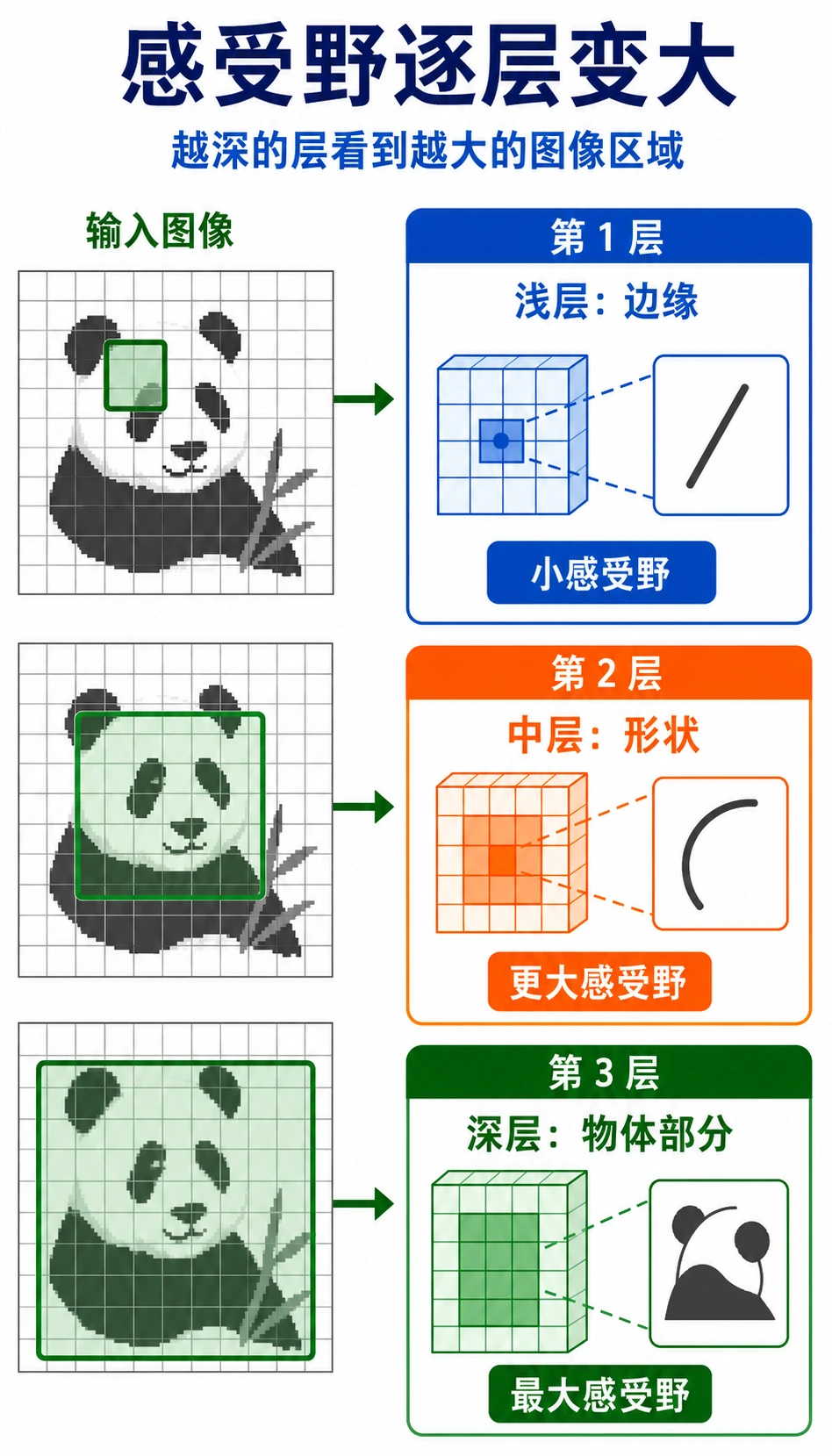
一层 3 x 3 卷积只能看很小的局部区域。如果堆叠多层,后面的特征会间接依赖原图中更大的区域。
直觉:
| 层深度 | 常学到什么 |
|---|---|
| 浅层 | 边缘、颜色变化、纹理 |
| 中层 | 角点、简单形状、部件 |
| 深层 | 更大的物体部件和语义模式 |
这就是 CNN 适合图像的原因:小局部线索可以逐层组合成更大的视觉概念。
基础 Conv2d 检查清单
import torch
from torch import nn
x = torch.randn(1, 1, 8, 8)
conv = nn.Conv2d(
in_channels=1,
out_channels=4,
kernel_size=3,
stride=1,
padding=1,
)
y = conv(x)
print("conv2d_lab")
print("input:", tuple(x.shape))
print("output:", tuple(y.shape))
print("weight:", tuple(conv.weight.shape))
print("bias:", tuple(conv.bias.shape))
预期输出:
conv2d_lab
input: (1, 1, 8, 8)
output: (1, 4, 8, 8)
weight: (4, 1, 3, 3)
bias: (4,)
读任何 Conv2d 时,先问:
- 输入 shape
[N, C, H, W]是什么? in_channels是否等于输入的C?out_channels会创建多少个 feature map?kernel_size、stride、padding会怎样改变H和W?
常见错误
| 错误 | 为什么有问题 | 修复 |
|---|---|---|
在 PyTorch 里用 [H, W, C] | PyTorch 期待 [N, C, H, W] | 从图像库转换时用 permute |
in_channels 写错 | Conv2d 接不上输入 | 层前打印 x.shape |
| 忘记 padding | feature map 意外变小 | 计算输出尺寸或打印 shape |
| 把卷积当魔法 | 很难调试 feature | 记住 patch * kernel -> sum |
| 太早 flatten | 空间结构丢失 | 先用 conv block,再接 classifier head |
练习
- 改变手写
2 x 2kernel,观察输出如何变化。 - 手算实验 1 的
out[1, 0],和输出对照。 - 把 size lab 里的
stride改成1,输出 shape 变成什么? - 把 channel lab 里的
out_channels改成16,哪些 shape 会变? - 用
permute把图像样式张量从[N, H, W, C]转成[N, C, H, W]。
小结
- 卷积比过早 flatten 更能保留局部空间结构。
- kernel 是在不同位置共享的小型模式检测器。
stride和padding控制 kernel 如何移动,以及输出尺寸如何变化。- 多通道卷积会综合多个输入通道的信息。
- 堆叠卷积层会扩大感受野,并建立视觉层级。