12.2.2 扩散模型原理
生成模型有很多路线:
- GAN 想一次性生成
- VAE 想学潜空间分布
扩散模型则换了一个非常特别的思路:
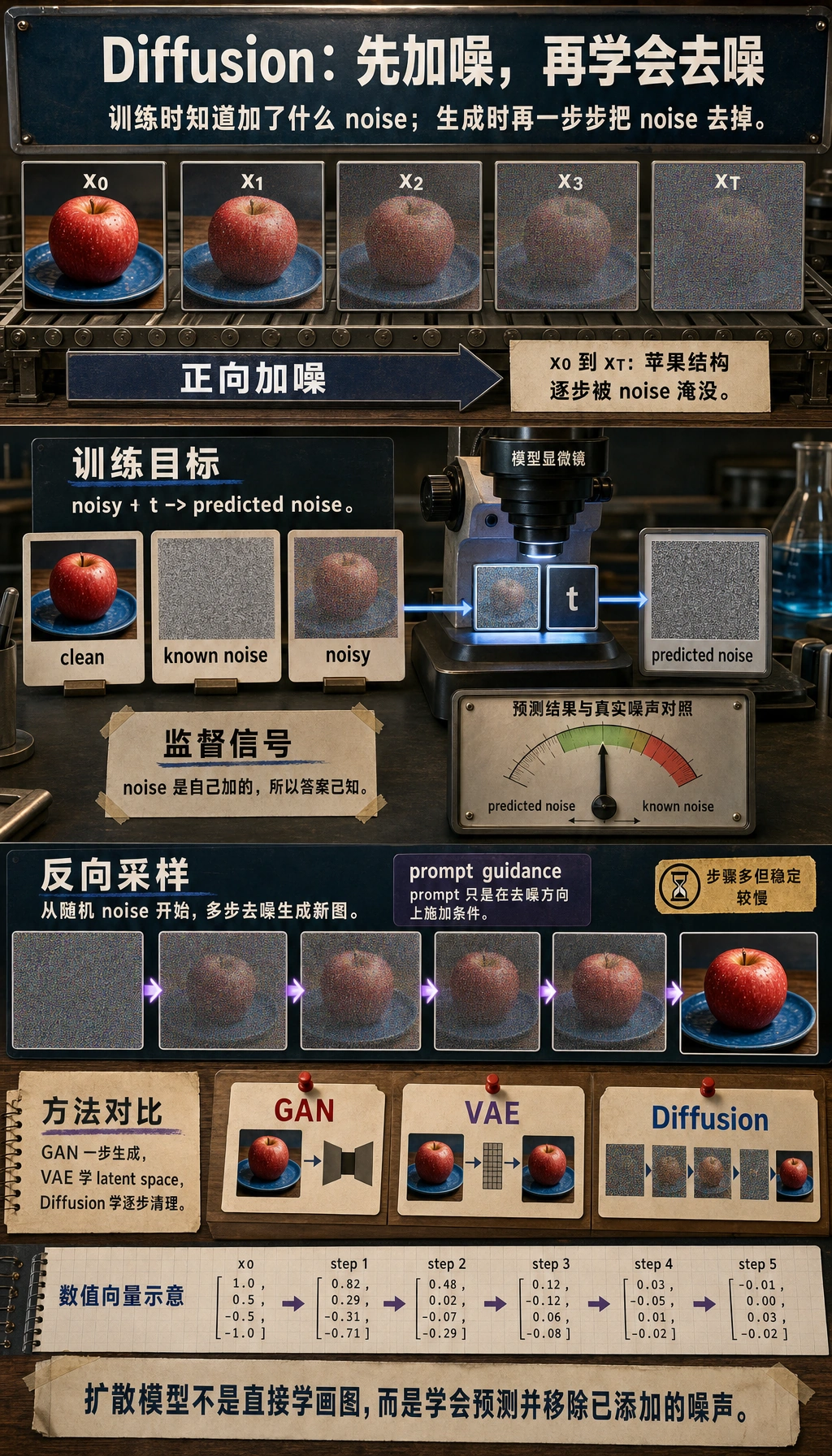
先把真实样本一步步弄脏,再学会把它一步步洗干净。
这条思路后来成为图像生成里非常重要的一条主线。
学习目标
- 理解为什么图像生成是高难问题
- 理解扩散模型里“加噪”和“去噪”这两个方向
- 看懂一个最小正向加噪示例
- 理解模型训练时真正学的是什么
- 建立对扩散模型整体流程的稳定直觉
历史背景:扩散模型是怎么变成主线的?
扩散模型不是一夜之间变成主流的。对新人来说,最值得知道的是这两个节点:
| 年份 | 论文 | 关键作者 | 它最重要地解决了什么 |
|---|---|---|---|
| 2020 | Denoising Diffusion Probabilistic Models (DDPM) | Ho 等 | 把扩散模型做成高质量、稳定的生成路线 |
| 2022 | High-Resolution Image Synthesis with Latent Diffusion Models | Rombach 等 | 把扩散从像素空间搬到潜空间,大幅降低成本,成为 Stable Diffusion 主线 |
对新人来说,最值得先记的是:
扩散模型之所以重要,不只是“图更好看”,而是它提供了一条比很多 GAN 路线更稳定、可控的生成主线。
而 Latent Diffusion 则进一步解决了:
- 图像空间太大、直接扩散成本太高
所以今天你看到的很多文生图系统,本质上都站在这条历史线上。
先建立一张地图
如果你已经接受了“图像生成不是分类”的前提,这一节最自然的续接就是:
- 前面你知道系统开始从“理解输入”走向“构造输出”
- 这一节开始回答:扩散模型为什么会成为图像生成里特别重要的一条主线
所以这节真正重要的不是一堆公式,而是:
- 先把“加噪 -> 学去噪 -> 从噪声采样”这条生成链路立起来
扩散模型这节最适合新人的理解顺序不是“先背公式”,而是先看清:
所以这节真正想解决的是:
- 为什么扩散模型要先“弄脏”数据
- 训练时模型到底在学什么
- 为什么推理时要从噪声开始
一、为什么图像生成这么难?
先看分类和生成的差别
做分类时,你是在问:
- 这张图是不是猫?
做生成时,你是在问:
- 生成一张像猫的图。
这两个任务看起来只差一点,但难度完全不在一个量级。
真正难在哪?
因为图像空间太大了。 随便生成一堆像素,绝大多数都会看起来像噪声,而不是“合理图片”。
所以生成模型真正要学的是:
怎样从几乎无限的像素组合里,落到那些“像真实图像”的区域。
扩散模型的厉害之处就在于,它没有试图一步到位,而是把问题拆成了很多个更小的去噪步骤。
第一次学扩散模型,最该先抓住什么?
最该先抓住的不是公式,而是这句:
扩散模型不是直接学“怎么画图”,而是在学“怎样一步步把噪声变回结构”。
这句话一旦稳住,后面:
- 正向过程
- 反向过程
- 噪声预测
- 采样
都会更自然地落到同一条主线上。
二、扩散模型最核心的直觉
正向过程:把图像一步步加噪
如果你有一张真实图像,只要不断往里面加噪:
- 一开始还能看出结构
- 后来越来越模糊
- 最后几乎变成纯噪声
这个过程非常容易定义。
反向过程:学会一步步去噪
难的部分在反向:
- 给你一张带噪图
- 你要猜怎样把噪声去掉一点
如果这个动作做很多步,最后就有机会从噪声里恢复出有结构的图像。
一个很好记的类比
可以把它想成:
- 正向:把一张干净照片不断抹上墨
- 反向:学会怎样一点点把墨去掉
真正难的不是抹脏,而是洗回去。
为什么这种拆法对生成任务特别有价值?
因为它把原本非常难的一步生成问题,拆成了很多更小的局部问题:
- 当前这一步该去掉多少噪声
- 现在这张图还保留了多少结构
这也是扩散模型后来会显得“更稳但更慢”的根源之一。
三、一个最小可运行的正向加噪示例
先不用图片,先看一维向量,方便把“逐步加噪”的过程看清。
import numpy as np
np.random.seed(42)
x0 = np.array([1.0, 0.5, -0.5, -1.0], dtype=np.float32)
print("x0 =", x0)
x = x0.copy()
for step in range(1, 6):
noise = np.random.randn(*x.shape).astype(np.float32) * 0.2
x = 0.8 * x + noise
print(f"step {step}: {np.round(x, 3)}")
预期输出:
x0 = [ 1. 0.5 -0.5 -1. ]
step 1: [ 0.899 0.372 -0.27 -0.495]
step 2: [ 0.673 0.251 0.099 -0.243]
step 3: [ 0.444 0.309 -0.013 -0.287]
step 4: [ 0.404 -0.135 -0.355 -0.342]
step 5: [ 0.12 -0.045 -0.466 -0.556]
运行后从上到下看每一行。数值不是立刻变成随机噪声,而是旧信号被逐步削弱,同时新噪声不断混入,这就是正向扩散最直观的样子。
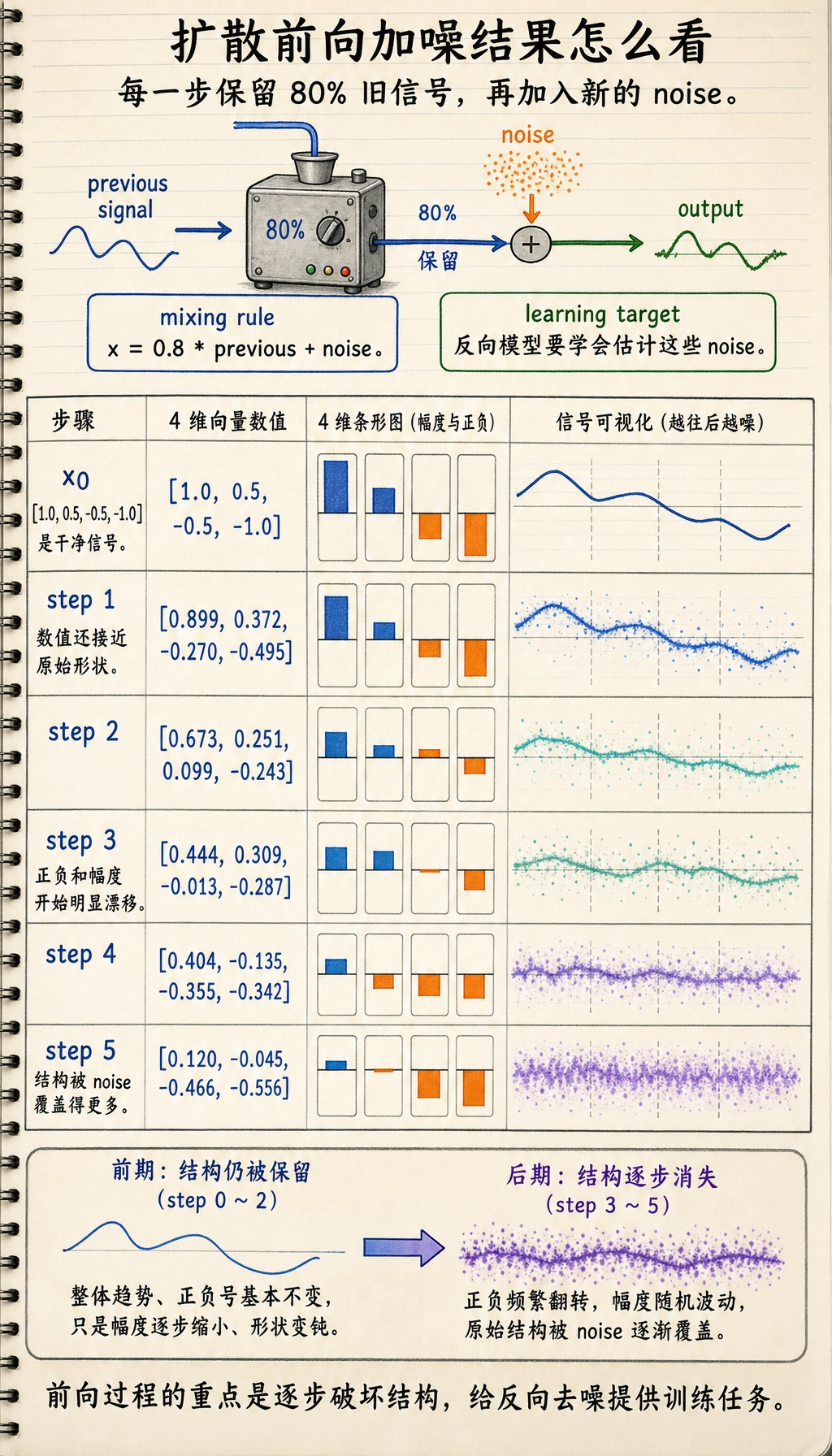
不要把输出看成六组互不相关的数组。每一行都是上一轮信号再次混入可控噪声后的状态,所以趋势比单个数字更重要。
这段代码到底在教什么?
它在教你两个非常关键的事实:
- 每一步都保留一部分原始结构
- 每一步都混入一部分新的噪声
随着步数越来越多,结构会越来越不清晰。
这就是正向扩散的直觉版本。
四、为什么正向过程容易,反向过程难?
因为正向过程是你自己定义的
你完全知道:
- 这一步加了多少噪声
- 原信号衰减了多少
所以正向过程几乎是“人为可控”的。
反向过程为什么难?
因为当你只看到一个带噪样本时,你并不知道:
- 哪部分是原来的结构
- 哪部分是后面混进去的噪声
这就像你拿到一张被涂脏的纸,但不知道原来图案长什么样。
所以模型真正要学的是:
如何从带噪状态里预测噪声成分。
五、训练时模型到底在学什么?
一个非常关键的点
扩散模型训练时,通常不是直接让模型“学画图”,而是让它学:
给定带噪样本,预测里面的噪声。
为什么这很聪明?
因为训练时噪声是你自己加进去的,所以监督信号天然就有:
- 原样本你知道
- 噪声你也知道
因此问题就变成了一个比较明确的监督学习任务。
这一点为什么是理解扩散模型的关键转折?
因为很多新人第一次学扩散模型时,会误以为:
- 模型是在直接学“整张图的正确样子”
但更准确的理解是:
- 训练时它更像在学一个条件去噪器
这个视角一旦稳住,后面再看 Stable Diffusion、条件生成、图像编辑就会顺很多。
一个最小“学习目标”示意
import numpy as np
x_clean = np.array([1.0, -0.5, 0.8], dtype=np.float32)
noise = np.array([0.2, -0.1, 0.3], dtype=np.float32)
x_noisy = 0.9 * x_clean + noise
print("clean =", x_clean)
print("noise =", noise)
print("noisy =", x_noisy)
预期输出:
clean = [ 1. -0.5 0.8]
noise = [ 0.2 -0.1 0.3]
noisy = [ 1.1 -0.55 1.02]
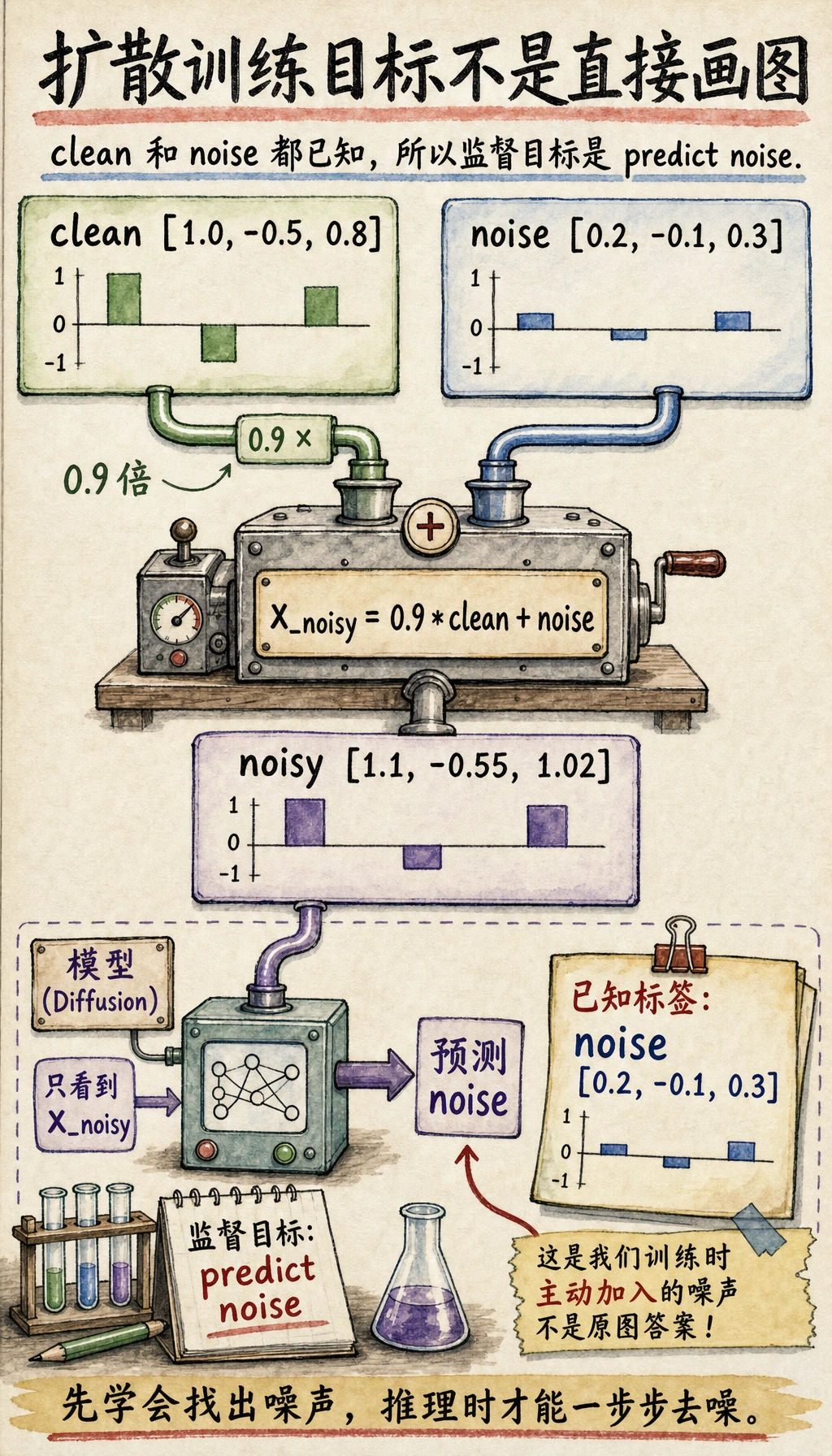
训练时 clean 和 noise 都是已知的,因为带噪样本就是你自己构造出来的。所以扩散训练可以被组织成一个“从带噪样本预测已添加噪声”的监督学习任务。
如果模型学会了从 x_noisy 预测 noise,
它就能在推理时一步步把噪声剥离掉。
六、采样时为什么要从纯噪声开始?
因为推理时没有原图可用
生成时并没有 x0,只有噪声。
所以系统通常从:
- 一团随机噪声
开始,然后反复做:
- 预测当前噪声
- 去掉一点噪声
- 得到更干净一点的状态
一步步去噪和一步生成的差别
GAN 更像:
- 一步直接生成
扩散模型更像:
- 逐步雕刻
这也是为什么扩散模型常常给人一种“更稳但更慢”的感觉。
七、为什么这种路线后来很强?
训练通常更稳
相比很多 GAN 训练里的对抗不稳定,扩散模型的训练往往更稳定一些。
条件化能力很自然
一旦你能在去噪过程中加入条件信息,就可以做:
- 文生图
- 图像编辑
- 局部修复
这也是它后来迅速变强的重要原因。
初学者第一次学扩散模型时最该先记什么
最值得先记住的是:
- 正向过程很容易定义
- 训练时模型主要在学“预测噪声”
- 推理时系统是在一步步把噪声擦掉
为什么它会直接连到后面的 Stable Diffusion 主线?
因为后面很多具体系统虽然结构更复杂,但底层直觉并没有变:
- 还是有噪声过程
- 还是有去噪网络
- 还是在做条件化生成
所以这一节真正重要的是把“扩散式生成”的骨架立住。
八、扩散模型的代价是什么?
采样慢
因为不是一步生成,而是很多步去噪。
计算重
尤其是在高分辨率图像上,成本会比较高。
所以后来大家都在做什么?
主要就是两件事:
- 提高采样效率
- 降低扩散操作的空间成本
这也正好引出下一节:
Stable Diffusion 为什么要把扩散放进 latent space。
小结
这一节最重要的不是背公式,而是抓住这条主线:
扩散模型不是直接学会“画图”,而是学会“怎么把带噪样本一步步去噪回有结构的样子”。
只要这个直觉稳了,后面看 Stable Diffusion 的结构就会自然很多。
这节最该带走什么
- 扩散模型不是一次性生成,而是逐步去噪
- 它的训练目标比很多人想象中更像监督学习
- 这也是它后来能在图像生成里成为主线的重要原因
练习
- 改一下本节示例里的衰减系数
0.8,观察结构消失速度变化。 - 用自己的话解释:为什么说扩散模型训练更像“学去噪”,而不是“直接学画图”?
- 想一想:为什么扩散模型通常会比一步生成的方法更慢?
- 如果你要向别人解释扩散模型,怎么用“先弄脏再洗干净”的类比去讲?