12.1.2 多模态学习基础
学习目标
完成本节后,你将能够:
- 理解什么是“模态”
- 说清楚多模态系统为什么更接近真实世界
- 理解融合(fusion)和对齐(alignment)的直觉
- 跑通一个极简的图文匹配小例子
历史背景:多模态为什么会突然变成主线?
这一节最值得知道的历史节点是:
| 年份 | 论文 / 方法 | 关键作者 | 它最重要地解决了什么 |
|---|---|---|---|
| 2021 | CLIP | Radford 等 | 把图像和文本对齐到同一语义空间,显著推进了图文检索、视觉语言理解和多模态基础模型路线 |
对新人来说,最值得先记的是:
CLIP 的意义,不只是“图文检索更强了”,而是它让“不同模态先对齐、再做任务”这条路线真正站稳了。
所以你在这节看到的“对齐”和“共享语义空间”,不是抽象概念, 而是后来很多多模态系统真正能工作的基础。
为什么 CLIP 这类工作会让很多人第一次觉得“多模态真的成了”?
因为在更早的时候,很多图文系统更像:
- 为单个任务单独搭一个模型
- 每换一个任务,就重新做一套
而 CLIP 带来的那种感觉很不一样:
- 图像和文本也许可以先学到一个共同空间
- 一旦这层对齐站稳,很多任务都能在上面继续长
这和很多人第一次接触 BERT / GPT 时的感觉有一点像:
- 不再只是“某个任务做得更好”
- 而像是“底座本身变强了”
所以 CLIP 让人兴奋的地方, 往往不只是图文检索成绩, 而是它让“多模态基础模型”第一次显得特别像一条真正会继续长大的主线。
为什么 CLIP 这类工作会让多模态突然变得“很像一个时代”?
因为在此之前,很多图文任务更像:
- 为单个任务单独造系统
而 CLIP 让很多人第一次强烈感觉到:
- 也许图像和文本可以先学到同一个共享语义空间
- 然后很多任务都能从这个底座继续长出来
这件事非常像 NLP 里预训练模型带来的那种感觉:
- 不再只是“做一个任务”
- 而是在搭一个更通用的底座
所以 CLIP 对很多初学者最有吸引力的地方在于:
它让“图文真的能互相理解”这件事,第一次显得不只是 Demo,而像一条稳定技术路线。
先建立一张地图
如果你刚学完前面的文本系统和 Agent 主线,可以先把这节理解成:
- 前面很多系统主要只处理文本
- 这一节开始回答:如果系统还要看图、听音频、理解视频,它该怎样把这些信息放进同一条链路里
所以这节真正重要的不是概念堆叠,而是:
- 给后面多模态理解和多模态生成铺一层最小系统直觉
多模态基础这节最适合新人的理解顺序不是“先记概念名词”,而是先看清:
所以这节真正想解决的是:
- 什么叫“模态”
- 为什么对齐和融合是多模态的两个核心动作
一、什么叫模态?
模态(modality)可以简单理解成“信息的表现形式”。
常见模态包括:
- 文本
- 图像
- 音频
- 视频
- 结构化表格
所以多模态系统,就是同时处理两种或更多种信息形式的系统。
类比一下:
人类理解世界不是只靠文字,而是会同时看、听、读、说。多模态 AI 也是在往这个方向走。
第一次学多模态,最该先抓住什么?
最该先抓住的不是模态种类列表,而是这句:
多模态真正想解决的,是把不同来源的信息放进同一条理解链路里。
这句话一旦稳住,后面你看:
- 图文检索
- 视觉问答
- 多模态对话
就会更自然地先问:这些系统到底是怎么把不同信号对起来的。
二、为什么真实世界天然是多模态的?
想几个日常场景:
- 看商品图 + 读商品描述
- 看病历文字 + 看医学影像
- 看监控视频 + 听报警音
- 上传截图 + 问“这是什么错误”
如果 AI 只能看文字,它就像“闭着眼工作”; 如果只能看图片,它又像“不会读说明书”。
所以多模态系统的重要性在于:
它能把不同来源的信息拼在一起理解。
三、多模态任务有哪些?
| 任务 | 例子 |
|---|---|
| 图像描述 | 给图片生成一句话说明 |
| 图文检索 | 用文字找图、用图找文字 |
| 视觉问答 | 看图回答问题 |
| OCR + 理解 | 读图中文字并理解内容 |
| 视频理解 | 总结视频内容 |
| 语音助手 | 听懂语音并回答 |
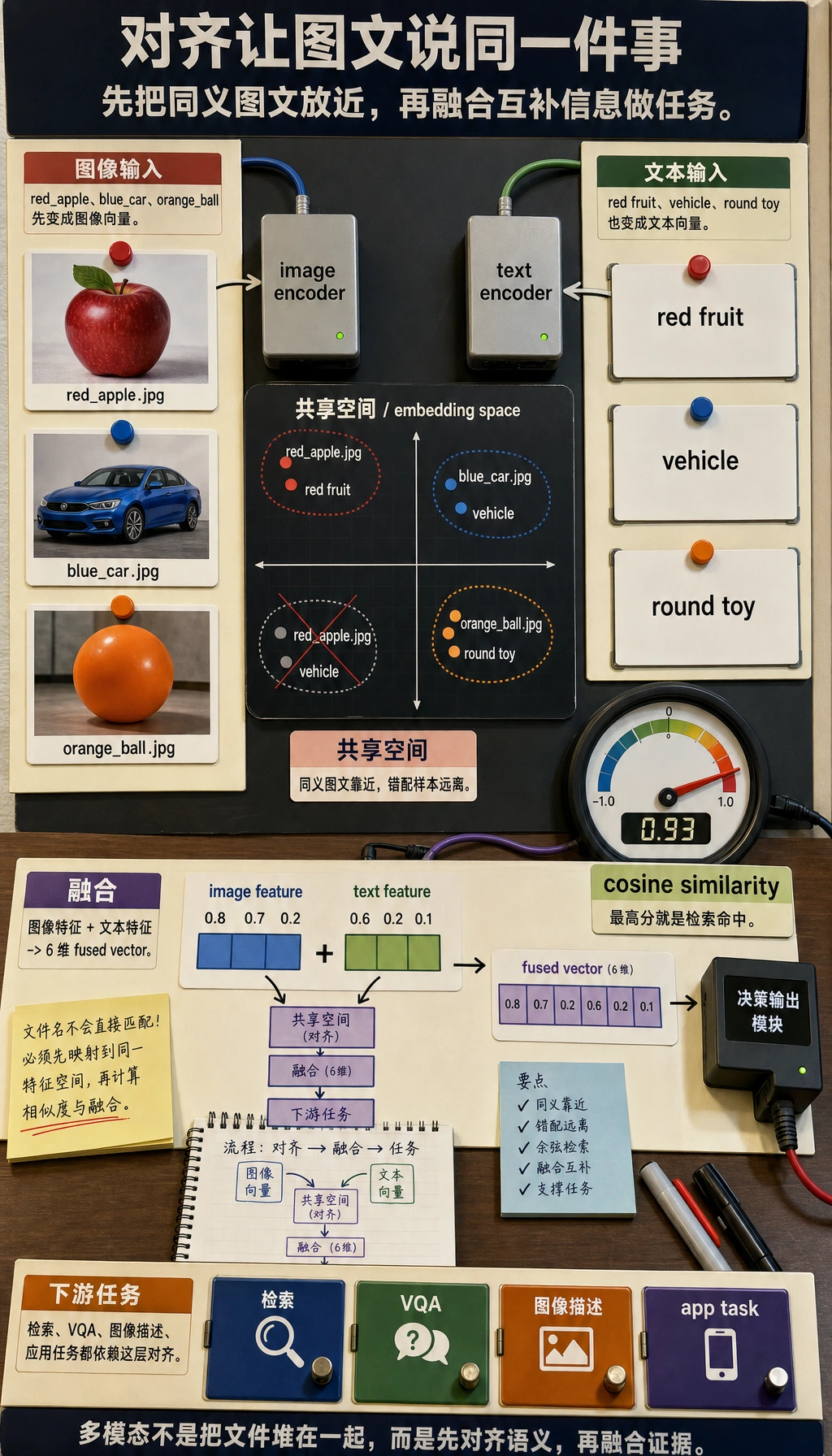
四、融合(Fusion)是什么意思?
融合可以理解成:
把不同模态的信息合在一起,形成更完整的理解。
比如做商品推荐时:
- 只看图片,可能知道风格
- 只看文字,可能知道用途
- 图文一起看,理解才更完整
一个极简例子
假设我们把商品图片和文案都提取成特征,再合并:
import numpy as np
# 图片特征:亮度、红色程度、圆形程度
image_feature = np.array([0.8, 0.7, 0.2])
# 文本特征:时尚感、运动感、商务感
text_feature = np.array([0.6, 0.2, 0.1])
# 最简单的融合:拼接
fused_feature = np.concatenate([image_feature, text_feature])
print("图像特征:", image_feature)
print("文本特征:", text_feature)
print("融合后特征:", fused_feature)
print("融合后维度:", fused_feature.shape)
预期输出:
图像特征: [0.8 0.7 0.2]
文本特征: [0.6 0.2 0.1]
融合后特征: [0.8 0.7 0.2 0.6 0.2 0.1]
融合后维度: (6,)

融合后的向量是 6 维,因为它保留了 3 个图像维度,又接上了 3 个文本维度。真实模型不会这么简单,但这个例子能把核心思路看清楚。
真实模型里当然比这复杂得多,但“多源信息合并”的思路就是这样。
融合这件事最值得先记住的,不是方式,而是目的
最值得先记的是:
- 单模态看不全
- 多模态是为了让系统判断得更完整
所以融合不只是把向量拼起来,而是在回答:
- 哪些信息源应该被一起看
- 哪些信息是互补的
五、对齐(Alignment)是什么意思?
对齐是多模态里另一个关键概念。
你可以把它理解成:
让不同模态里的“同一个意思”,在表示空间里彼此靠近。
比如:
- 一张猫的图片
- 文本 “a cute cat”
如果模型学得好,它们的向量表示应该比较接近。
为什么“对齐”会成为多模态里最核心的词之一?
因为如果不同模态的表示根本对不上,后面几乎什么都做不了:
- 文本找图
- 图文问答
- 图像描述
这些能力的前提,都是:
- 不同模态得先在某种共享空间里“知道彼此在说同一件事”
六、一个可运行的图文匹配玩具例子
import numpy as np
images = {
"red_apple.jpg": np.array([0.9, 0.1, 0.0]), # 红色、圆形、不是交通工具
"blue_car.jpg": np.array([0.1, 0.2, 1.0]), # 非红、略圆、是交通工具
"orange_ball.jpg": np.array([0.8, 0.9, 0.0]) # 偏暖色、很圆、不是交通工具
}
texts = {
"red fruit": np.array([0.95, 0.2, 0.0]),
"vehicle": np.array([0.0, 0.1, 1.0]),
"round toy": np.array([0.7, 0.95, 0.0])
}
def cosine_similarity(a, b):
return float(np.dot(a, b) / (np.linalg.norm(a) * np.linalg.norm(b)))
for text_name, text_vec in texts.items():
print(f"\n查询文本: {text_name}")
scores = []
for image_name, image_vec in images.items():
scores.append((cosine_similarity(text_vec, image_vec), image_name))
scores.sort(reverse=True)
for score, image_name in scores:
print(f" {image_name}: {score:.4f}")
预期输出:
查询文本: red fruit
red_apple.jpg: 0.9953
orange_ball.jpg: 0.8041
blue_car.jpg: 0.1357
查询文本: vehicle
blue_car.jpg: 0.9905
orange_ball.jpg: 0.0744
red_apple.jpg: 0.0110
查询文本: round toy
orange_ball.jpg: 0.9958
red_apple.jpg: 0.6785
blue_car.jpg: 0.2150
最高分就是检索命中的图片。如果最高分错了,首先要检查的是图像和文本是否真的对齐到了同一个特征空间里。
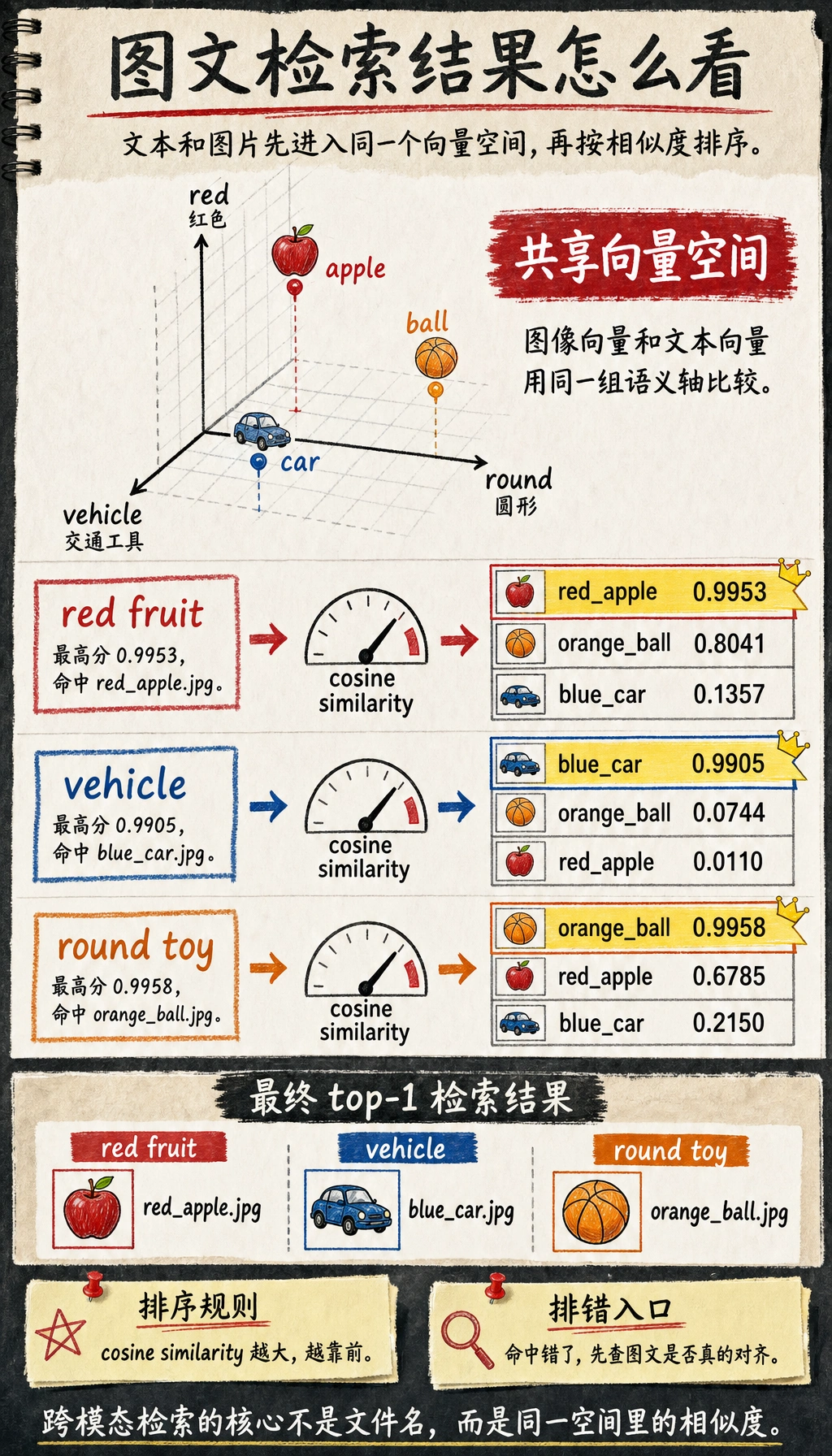
真正起作用的不是文件名,而是文本向量和图像向量进入同一个特征空间后,按 cosine similarity 选出最高分。
这就是“跨模态检索”的最小原理版:
- 文本和图像都变成向量
- 再比较相似度
七、多模态为什么更难?
因为它同时要解决两类问题:
- 每种模态内部怎么建模
- 不同模态之间怎么对齐和融合
比如图像有图像自己的难点:
- 空间结构
- 光照变化
- 视角变化
而文本又有文本自己的难点:
- 歧义
- 上下文
- 长文本结构
两边一合起来,复杂度自然更高。
八、今天常见的多模态路线
双塔检索路线
图像一套编码器,文本一套编码器,最后比向量相似度。
统一 Transformer 路线
把图像、文本都映射到统一序列空间,再统一建模。
大模型扩展路线
在语言模型前面接上图像编码器、音频编码器等模块。
这就是为什么今天很多系统都能做到:
- 看图问答
- 图文对话
- OCR 理解
九、初学者常见误区
以为多模态就是“图片 + 文本”
不止。 语音、视频、传感器信号也都属于模态。
以为多模态一定比单模态强
不一定。 如果额外模态质量差,反而可能引入噪声。
只看酷炫 Demo,不看对齐问题
多模态真正难的地方,往往就在对齐和融合。
小结
这节课最重要的一句话是:
多模态的价值,在于把不同信息来源拼起来,形成更完整的理解。
后面继续学视觉语言模型时,你会看到这种“图文对齐”是如何被真正用到模型里的。
这节最该带走什么
- 多模态系统的本质是把不同形式的信息放进同一条理解链路
- “对齐”和“融合”是最该先记住的两个核心动作
- 先把输入和任务想清楚,比一上来追模型名更重要
如果再压成一句话,那就是:
多模态的关键,不是模态更多,而是系统终于开始把不同信息来源放到同一个判断框架里。
练习
- 修改上面的图像和文本向量,观察匹配排序怎么变化。
- 自己设计一个“食物 / 交通工具 / 动物”的玩具向量空间。
- 想一想:为什么“截图报错 + 提问文字”比只给报错文字,更适合用多模态系统?