4.1.3 矩阵:数据的批量变换
学习目标
- 直觉理解矩阵是什么(一张表格 / 一批操作)
- 掌握矩阵乘法的含义和计算
- 理解转置、逆矩阵的直觉
- 理解为什么神经网络的每一层都是矩阵乘法
- 用 NumPy 实现矩阵运算
先说一个很重要的学习预期
这一节不是要把矩阵论学完,而是先把最常在 AI 里见到的三层感觉稳住:
- 矩阵可以装一批数据
- 矩阵也可以表示一种批量变换
- 矩阵乘法会在后面模型里反复出现
先建立一张地图
矩阵这节如果只把它看成“数字表格”,很容易越学越抽象。更适合新人的看法是:
所以这节最重要的不是死背矩阵定义,而是弄明白:
- 为什么一批数据会自然写成矩阵
- 为什么矩阵乘法能一次处理一批样本
- 为什么深度学习代码里到处是
X @ W
随手查的术语和代码前提
| 术语 | 含义 | 为什么这里重要 |
|---|---|---|
batch | 批量,一组一起处理的样本 | 矩阵常常存一批数据:行是样本,列是特征。 |
feature | 特征,例如面积、年龄、距离等输入列 | 矩阵的列通常对应不同特征。 |
shape | NumPy 对数组大小的描述 | 矩阵乘法只有内部维度匹配时才能运行。 |
bias / b | 偏置,乘法后再加上的可学习偏移量 | X @ W + b 让模型不只是旋转或缩放,还能平移输出。 |
ReLU | Rectified Linear Unit,修正线性单元激活函数 | 它把负数变成 0、正数保持不变,为网络加入非线性。 |
determinant | 行列式,用来判断方阵是否把空间压扁 | 如果它等于 0,矩阵就没有逆。 |
singular matrix | 奇异矩阵,也就是没有逆的矩阵 | 它在变换时丢失信息,因此无法还原原输入。 |
除非代码片段特别说明,否则默认需要先写 import numpy as np。画图示例还需要 import matplotlib.pyplot as plt。
一、矩阵是什么?
两种理解方式
理解一:矩阵就是一张表格
一个更适合新人的类比
如果向量像“一张对象的信息卡片”, 那矩阵就可以先理解成:
- 一摞排整齐的信息卡片
这就是为什么在机器学习里:
- 一条样本是向量
- 一批样本就很自然地变成矩阵
你已经很熟悉了——Pandas 的 DataFrame 本质上就是一个矩阵。
import numpy as np
# 3 个学生的 4 门成绩
scores = np.array([
[85, 92, 78, 90], # 学生 1
[72, 88, 95, 85], # 学生 2
[90, 76, 88, 92], # 学生 3
])
print(f"形状: {scores.shape}") # (3, 4) → 3 行 4 列
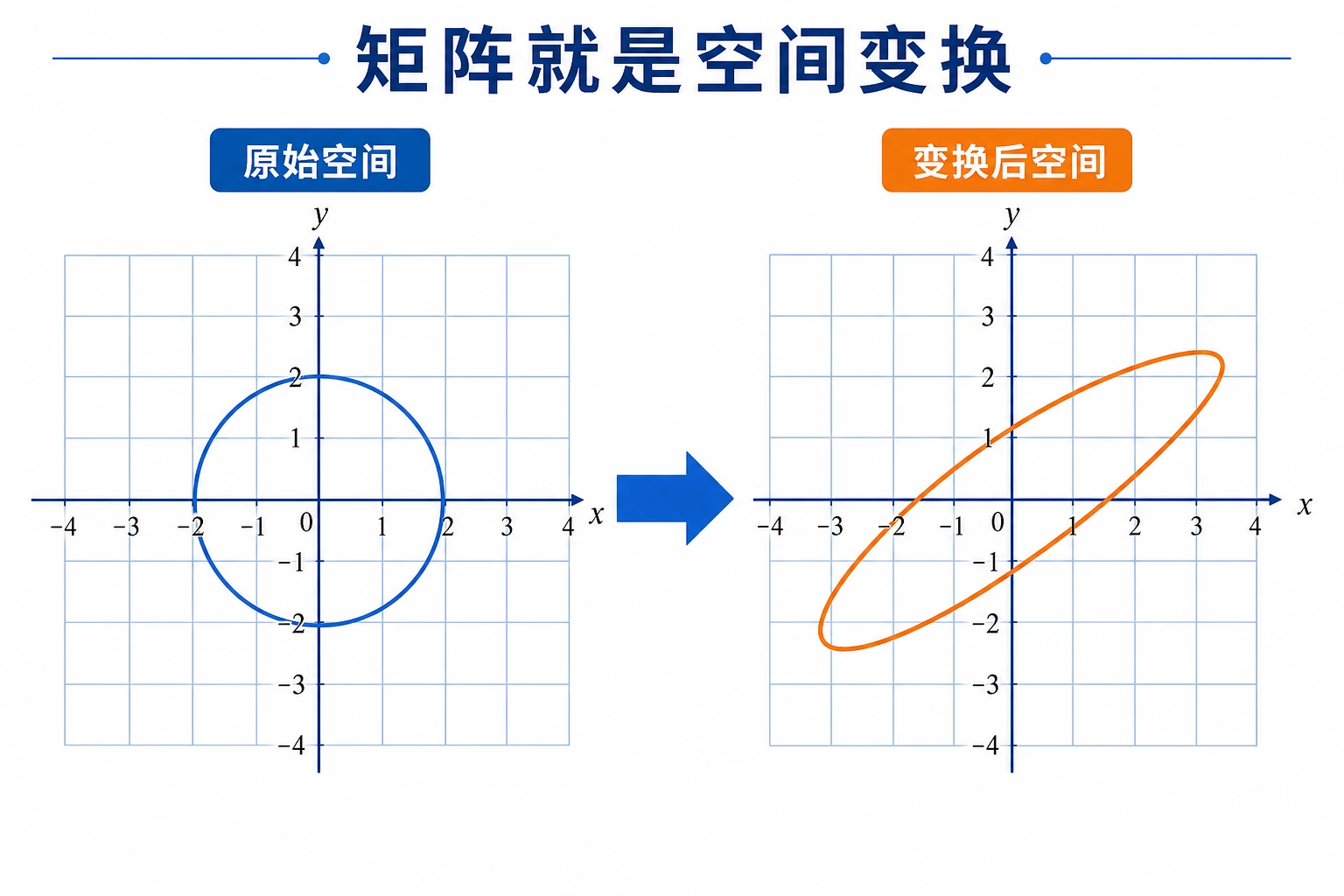
理解二:矩阵是一种"变换机器"
给矩阵一个向量,它会输出一个新的向量——就像一个函数,输入 → 变换 → 输出。
这就是线性代数最核心的思想:矩阵 = 变换。
矩阵的基本属性
M = np.array([
[1, 2, 3],
[4, 5, 6],
])
print(f"形状 (shape): {M.shape}") # (2, 3) → 2 行 3 列
print(f"行数: {M.shape[0]}") # 2
print(f"列数: {M.shape[1]}") # 3
print(f"元素总数: {M.size}") # 6
print(f"数据类型: {M.dtype}") # int64
print(f"第 0 行: {M[0]}") # [1 2 3]
print(f"第 1 行第 2 列: {M[1, 2]}") # 6
从“一个样本”到“一批样本”
如果你已经学过向量,可以把矩阵理解成:
把很多个向量按统一格式堆起来。
import numpy as np
# [面积, 房龄, 距离地铁距离]
house_1 = np.array([88, 5, 1.2])
house_2 = np.array([120, 8, 0.5])
house_3 = np.array([75, 2, 1.8])
X = np.array([
house_1,
house_2,
house_3,
])
print(X)
print("形状:", X.shape) # (3, 3)
这里的含义是:
- 每一行是一个样本
- 每一列是一个特征
这正是机器学习和深度学习里最常见的数据组织方式。
二、矩阵的基本运算
矩阵加法和数乘
和向量一样——对应位置相加/乘:
A = np.array([[1, 2], [3, 4]])
B = np.array([[5, 6], [7, 8]])
print("加法:\n", A + B) # [[6, 8], [10, 12]]
print("数乘:\n", 3 * A) # [[3, 6], [9, 12]]
矩阵乘法——最重要的运算
矩阵乘法和普通数字乘法完全不同!规则是:
结果的每个元素 = 左矩阵某行 与 右矩阵某列 的点积
A = np.array([[1, 2],
[3, 4]]) # 2×2
B = np.array([[5, 6],
[7, 8]]) # 2×2
# 矩阵乘法
C = A @ B # 推荐写法
# C = np.dot(A, B) # 等价写法
print("A @ B =")
print(C)
# [[19, 22], ← 1*5+2*7=19, 1*6+2*8=22
# [43, 50]] ← 3*5+4*7=43, 3*6+4*8=50
手算验证:
- C[0,0] = 1×5 + 2×7 = 5 + 14 = 19
- C[0,1] = 1×6 + 2×8 = 6 + 16 = 22
- C[1,0] = 3×5 + 4×7 = 15 + 28 = 43
- C[1,1] = 3×6 + 4×8 = 18 + 32 = 50
矩阵乘法的尺寸规则
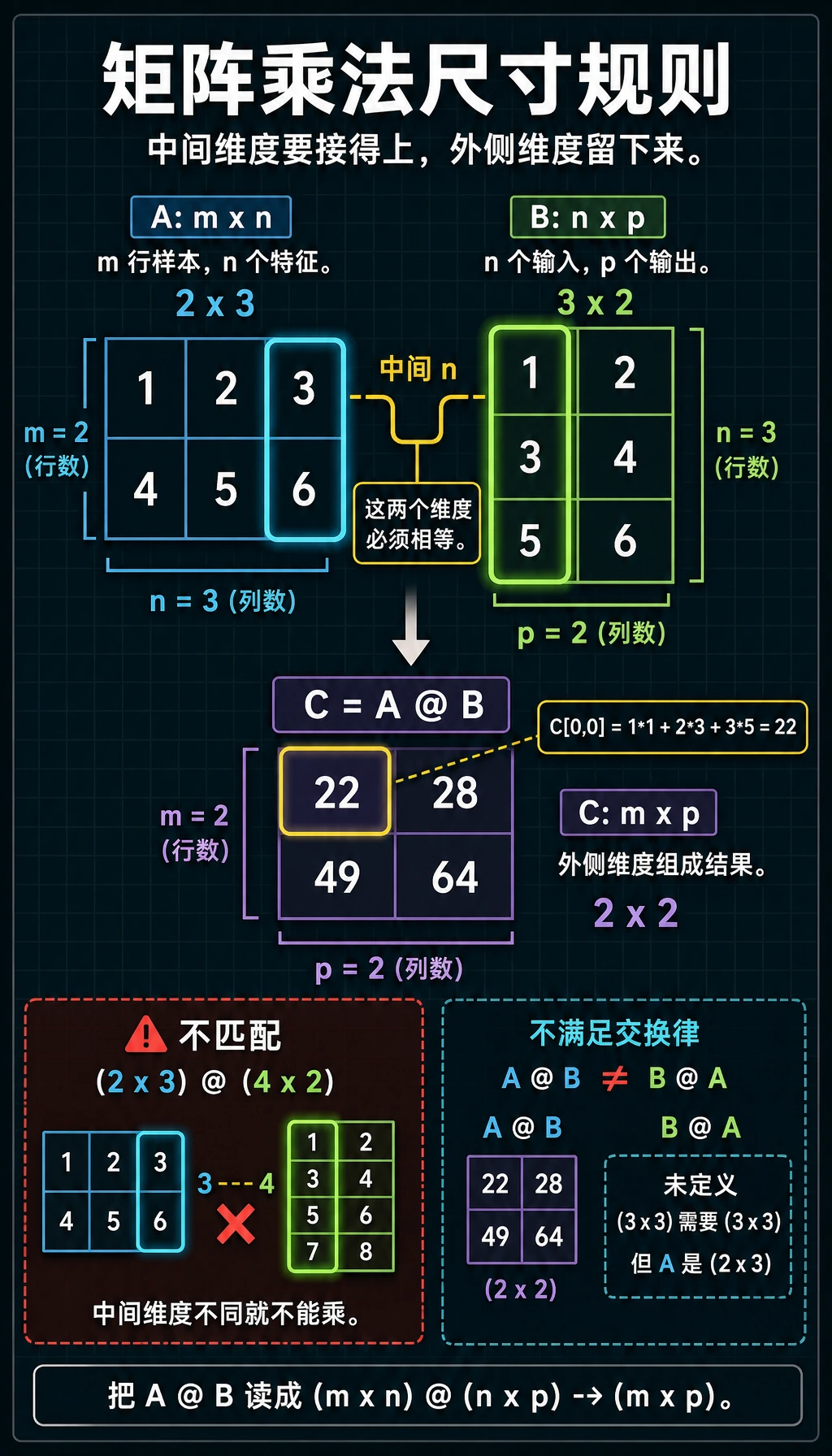
关键规则:左矩阵的列数 = 右矩阵的行数,结果的形状 = (左矩阵的行数, 右矩阵的列数)。
A = np.array([[1, 2, 3],
[4, 5, 6]]) # 2×3
B = np.array([[1, 2],
[3, 4],
[5, 6]]) # 3×2
C = A @ B # 2×2 ✓(3 == 3)
print(f"A({A.shape}) @ B({B.shape}) = C({C.shape})")
print(C)
# [[22, 28],
# [49, 64]]
A @ B 和 B @ A 通常不相等!甚至形状可能都不同。这和数字乘法(3×5 = 5×3)不一样,初学时要特别注意。
A = np.array([[1, 2], [3, 4]])
B = np.array([[5, 6], [7, 8]])
print("A @ B =\n", A @ B)
print("B @ A =\n", B @ A)
print("A@B == B@A?", np.array_equal(A @ B, B @ A)) # False
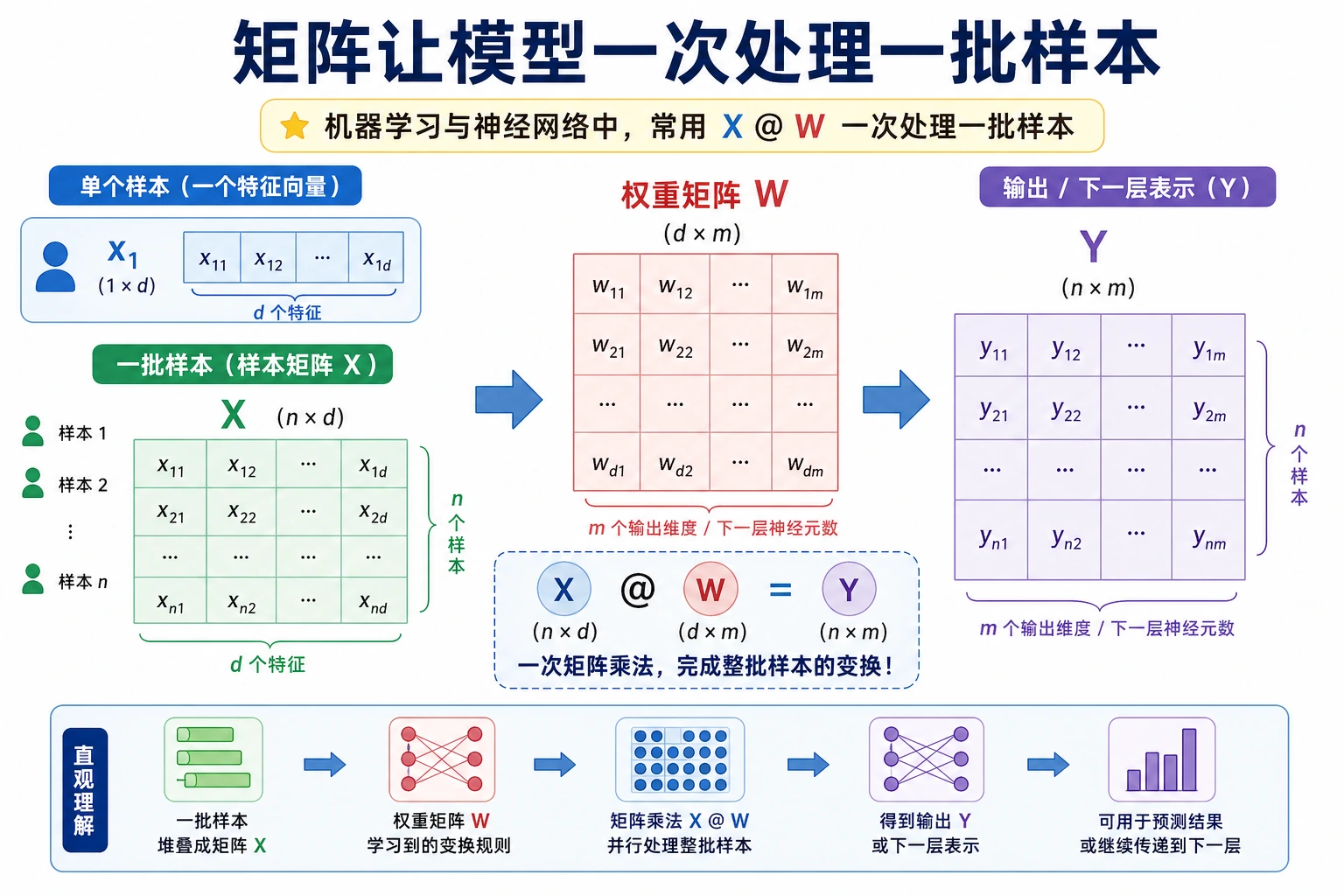
手算一次“样本矩阵 × 权重矩阵”
这是新人最值得吃透的一步,因为它直接连接后面的神经网络。
X = np.array([
[1, 2],
[3, 4],
[5, 6],
]) # 3×2
W = np.array([
[0.1, 1.0],
[0.2, 0.5],
]) # 2×2
Z = X @ W
print(Z.round(2))
预期输出:
[[0.5 2. ]
[1.1 5. ]
[1.7 8. ]]
你可以把它逐行理解成:
- 第 1 行输出 = 第 1 个样本
[1, 2]和权重矩阵做变换 - 第 2 行输出 = 第 2 个样本
[3, 4]和权重矩阵做变换 - 第 3 行输出 = 第 3 个样本
[5, 6]和权重矩阵做变换
矩阵乘法的强大之处就在于:
它不是只算一个样本,而是一次把一批样本全算了。
新人最需要的 shape 检查四步
当你写矩阵乘法总报错时,先不要慌,先检查这四件事:
- 左边矩阵的形状是什么
- 右边矩阵的形状是什么
- 左边的列数是否等于右边的行数
- 你期望的输出形状是什么
print("X.shape =", X.shape)
print("W.shape =", W.shape)
print("Z.shape =", (X @ W).shape)
三、矩阵作为"变换"——直觉可视化
旋转变换
矩阵可以对向量做旋转、缩放、剪切等变换。下面演示用矩阵旋转一组二维点。
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 定义一个正方形的 4 个顶点 + 回到起点
square = np.array([
[0, 0],
[1, 0],
[1, 1],
[0, 1],
[0, 0], # 回到起点,方便画闭合图形
]).T # 转置成 2×5,方便做矩阵乘法
# 45° 旋转矩阵
theta = np.radians(45) # 角度转弧度
R = np.array([
[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]
])
print(f"旋转矩阵:\n{R.round(3)}")
# 应用旋转
rotated = R @ square # 矩阵乘法!
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
# 变换前
axes[0].plot(square[0], square[1], 'b-o', linewidth=2, markersize=8)
axes[0].fill(square[0], square[1], alpha=0.2, color='steelblue')
axes[0].set_xlim(-1.5, 1.5)
axes[0].set_ylim(-0.5, 1.8)
axes[0].set_aspect('equal')
axes[0].grid(True, alpha=0.3)
axes[0].set_title('变换前(原始正方形)')
# 变换后
axes[1].plot(square[0], square[1], 'b--', alpha=0.3, linewidth=1)
axes[1].plot(rotated[0], rotated[1], 'r-o', linewidth=2, markersize=8)
axes[1].fill(rotated[0], rotated[1], alpha=0.2, color='coral')
axes[1].set_xlim(-1.5, 1.5)
axes[1].set_ylim(-0.5, 1.8)
axes[1].set_aspect('equal')
axes[1].grid(True, alpha=0.3)
axes[1].set_title('变换后(旋转 45°)')
plt.suptitle('矩阵变换 = 旋转', fontsize=14)
plt.tight_layout()
plt.show()
关键洞察:一个 2×2 矩阵乘以一个 2D 向量,就完成了一次空间变换。这个思想可以推广到任意维度。
多种变换效果
fig, axes = plt.subplots(1, 4, figsize=(18, 4))
# 原始形状
triangle = np.array([
[0, 0], [1, 0], [0.5, 1], [0, 0]
]).T
transforms = [
(np.eye(2), '原始(单位矩阵)'),
(np.array([[2, 0], [0, 2]]), '缩放 2 倍'),
(np.array([[1, 0.5], [0, 1]]), '水平剪切'),
(np.array([[-1, 0], [0, 1]]), '水平翻转'),
]
for ax, (M, title) in zip(axes, transforms):
transformed = M @ triangle
ax.plot(triangle[0], triangle[1], 'b--', alpha=0.3)
ax.fill(triangle[0], triangle[1], alpha=0.1, color='blue')
ax.plot(transformed[0], transformed[1], 'r-o', linewidth=2, markersize=6)
ax.fill(transformed[0], transformed[1], alpha=0.2, color='coral')
ax.set_xlim(-2.5, 2.5)
ax.set_ylim(-0.5, 2.5)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.set_title(title)
plt.tight_layout()
plt.show()
四、转置和逆矩阵
转置(Transpose)
转置 = 行列互换。原来的第 i 行变成第 i 列。
A = np.array([
[1, 2, 3],
[4, 5, 6],
])
print(f"A 的形状: {A.shape}") # (2, 3)
print(f"A 的转置:\n{A.T}")
print(f"转置后形状: {A.T.shape}") # (3, 2)
输出:
A 的转置:
[[1 4]
[2 5]
[3 6]]
什么时候用转置?
- 数据处理:把"行是样本、列是特征"转换成"行是特征、列是样本"
- 矩阵运算:某些公式需要转置来让矩阵尺寸匹配
特殊矩阵
# 单位矩阵(对角线全是 1)
I = np.eye(3)
print("单位矩阵:\n", I)
# [[1. 0. 0.]
# [0. 1. 0.]
# [0. 0. 1.]]
# 单位矩阵的性质:A @ I = I @ A = A
A = np.array([[1, 2], [3, 4]])
print("A @ I == A?", np.allclose(A @ np.eye(2), A)) # True
数字运算中,任何数乘以 1 还是它本身。矩阵运算中,任何矩阵乘以单位矩阵也是它本身。
逆矩阵(Inverse)
如果说矩阵 A 是一种"变换",那逆矩阵 A⁻¹ 就是**"反变换"**——撤销 A 的操作。
A = np.array([[2, 1],
[1, 1]])
# 计算逆矩阵
A_inv = np.linalg.inv(A)
print("A 的逆矩阵:\n", A_inv)
# 验证:A @ A_inv = 单位矩阵
print("A @ A_inv =\n", (A @ A_inv).round(10))
# [[1. 0.]
# [0. 1.]] → 单位矩阵!
直觉:如果 A 把向量旋转了 45°,那 A⁻¹ 就把它转回来。如果 A 把向量放大了 2 倍,那 A⁻¹ 就缩小 2 倍。
# 可视化:变换 → 逆变换 = 回到原点
v = np.array([1, 2])
transformed = A @ v # 用 A 变换
recovered = A_inv @ transformed # 用 A_inv 还原
print(f"原始: {v}")
print(f"变换后: {transformed}")
print(f"还原后: {recovered}") # 和原始一样!
如果矩阵的行列式(determinant)为 0,就没有逆矩阵。
# 这个矩阵没有逆
singular = np.array([[1, 2], [2, 4]])
try:
np.linalg.inv(singular)
except np.linalg.LinAlgError as e:
print(f"错误: {e}") # Singular matrix
直觉:这种矩阵会把二维空间"压扁"成一条线,信息丢失了,无法还原。
五、矩阵与神经网络
神经网络的本质
这是整节课最重要的洞察:神经网络的每一层,本质上就是一次矩阵乘法 + 一个激活函数。
从单个神经元公式到矩阵公式
如果你只看单个样本,神经网络一层其实就是:
输出 = 输入向量 · 权重向量 + 偏置
import numpy as np
x = np.array([1.0, 0.5, -0.3])
w = np.array([0.2, -0.4, 0.6])
b = 0.1
y = x @ w + b
print(round(y, 4))
预期输出:
-0.08
如果我们不只算 1 个样本,而是一次算一批样本,就会自然变成:
Z = X @ W + b
这里:
X是样本矩阵W是权重矩阵b是偏置Z是线性输出
用代码模拟一层神经网络
# 模拟一层神经网络的前向传播
# 输入:3 个样本,每个有 4 个特征
X = np.array([
[1.0, 0.5, -0.3, 0.8],
[0.2, -0.1, 0.7, 0.3],
[0.9, 0.4, 0.1, -0.5],
])
print(f"输入 X: {X.shape}") # (3, 4)
# 权重矩阵:从 4 个特征映射到 2 个输出
rng = np.random.default_rng(seed=42)
W = rng.normal(size=(4, 2)) * 0.5
print(f"权重 W: {W.shape}") # (4, 2)
# 偏置
b = np.zeros(2)
# 前向传播:矩阵乘法 + 偏置
Z = X @ W + b # (3, 4) @ (4, 2) = (3, 2)
print(f"线性输出 Z: {Z.shape}")
# 激活函数(ReLU:负数变 0,正数不变)
def relu(x):
return np.maximum(0, x)
output = relu(Z)
print(f"激活后输出: {output.shape}") # (3, 2)
print(f"\n最终输出:\n{output.round(3)}")
使用 seed=42 时的预期输出:
输入 X: (3, 4)
权重 W: (4, 2)
线性输出 Z: (3, 2)
激活后输出: (3, 2)
最终输出:
[[0.684 0. ]
[0. 0. ]
[0.158 0. ]]
解读:
- 3 个样本(3 行),每个有 4 个特征(4 列)
- 权重矩阵 W 是 4×2,把 4 维特征映射到 2 维
- 矩阵乘法一次处理所有样本——这就是批量计算的威力
- 偏置
b的形状是(2,)。NumPy 会自动把它加到Z的每一行上,这叫广播(broadcasting)。
多层网络 = 矩阵连乘
# 模拟 3 层神经网络
rng = np.random.default_rng(seed=42)
X = rng.normal(size=(5, 10)) # 5 个样本,10 个特征
# 第 1 层:10 → 8
W1 = rng.normal(size=(10, 8)) * 0.3
h1 = relu(X @ W1)
print(f"第 1 层输出: {h1.shape}") # (5, 8)
# 第 2 层:8 → 4
W2 = rng.normal(size=(8, 4)) * 0.3
h2 = relu(h1 @ W2)
print(f"第 2 层输出: {h2.shape}") # (5, 4)
# 第 3 层(输出层):4 → 2
W3 = rng.normal(size=(4, 2)) * 0.3
output = h2 @ W3 # 输出层通常不用 ReLU
print(f"最终输出: {output.shape}") # (5, 2)
新人最容易犯的 3 个矩阵错误
-
把逐元素乘法
A * B误写成矩阵乘法 真正的矩阵乘法要用A @ B。 -
不先看形状就开始乘 只要
shape不对,后面一定会报错。 -
看不懂“每一行代表什么” 只要记住“每一行常常是一条样本”,你会容易很多。
如果没有激活函数(relu),多层矩阵乘法可以合并成一次:
(X @ W1) @ W2 = X @ (W1 @ W2)- 多层和单层没有区别!
激活函数引入了非线性,让网络能学习复杂的模式。这就是为什么每层都要"矩阵乘法 + 激活函数"。
六、实用场景:解线性方程组
矩阵的一个经典应用是求解线性方程组。
2x + y = 5
x + 3y = 7
写成矩阵形式:A @ x = b
# 系数矩阵
A = np.array([[2, 1],
[1, 3]])
# 右边的常数
b = np.array([5, 7])
# 解方程
x = np.linalg.solve(A, b)
print(f"解: x = {x[0]:.2f}, y = {x[1]:.2f}")
# 解: x = 1.60, y = 1.80
# 验证
print(f"验证: A @ x = {A @ x}") # [5. 7.] ✓
七、NumPy 矩阵操作汇总
import numpy as np
# ========== 创建矩阵 ==========
A = np.array([[1, 2], [3, 4]])
B = np.array([[5, 6], [7, 8]])
I = np.eye(2) # 单位矩阵
Z = np.zeros((3, 4)) # 全零矩阵
rng = np.random.default_rng(seed=42)
R = rng.normal(size=(3, 4)) # 随机矩阵
# ========== 基本运算 ==========
print("加法:\n", A + B)
print("数乘:\n", 2 * A)
print("逐元素乘:\n", A * B) # 注意:这不是矩阵乘法!
# ========== 矩阵乘法 ==========
print("矩阵乘法:\n", A @ B) # 推荐
print("矩阵乘法:\n", np.dot(A, B)) # 等价
print("矩阵乘法:\n", np.matmul(A, B)) # 等价
# ========== 转置 ==========
print("转置:\n", A.T)
# ========== 逆矩阵 ==========
print("逆矩阵:\n", np.linalg.inv(A))
# ========== 行列式 ==========
print("行列式:", np.linalg.det(A)) # -2.0
# ========== 解方程 ==========
b = np.array([1, 2])
x = np.linalg.solve(A, b)
print("方程解:", x)
学到这里,下一节该带着什么问题走?
看完矩阵以后,最值得带去下一节的问题是:
- 矩阵让大多数向量怎样变化?
- 有没有某些特别的方向,在变换后依然保持原方向?
- 为什么这些“特殊方向”会直接连到 PCA 和降维?
这几个问题,正好会把你自然带到:
- 下一节:特征值与特征向量——矩阵变换中"不改变方向"的特殊向量
- 神经网络:每一层都是矩阵乘法 + 激活函数
- 图像处理:卷积操作的底层也是矩阵运算
小结
| 概念 | 直觉理解 | NumPy 实现 |
|---|---|---|
| 矩阵 | 一张表格 / 一种变换 | np.array([[1,2],[3,4]]) |
| 矩阵乘法 | 行与列的点积组合 | A @ B |
| 转置 | 行列互换 | A.T |
| 单位矩阵 | "什么都不做"的变换 | np.eye(n) |
| 逆矩阵 | 撤销变换 | np.linalg.inv(A) |
| 解方程 | Ax = b → x = ? | np.linalg.solve(A, b) |
这节最该带走什么
- 矩阵一方面在装“一批数据”,另一方面也在表示“一次变换”
- 矩阵乘法最值得先理解成“批量点积”
- 这就是为什么后面 AI 代码里到处会看到
X @ W
动手练习
练习 1:矩阵乘法手算验证
给定:
A = np.array([[1, 0, 2],
[0, 3, 1]]) # 2×3
B = np.array([[2, 1],
[0, 4],
[3, 2]]) # 3×2
- 先手算 A @ B 的结果
- 再用 NumPy 验证
练习 2:旋转变换
用旋转矩阵把一个三角形旋转 90°,并画出变换前后的对比图。
提示:90° 旋转矩阵为 [[0, -1], [1, 0]]
练习 3:模拟两层神经网络
创建一个两层网络,输入 100 个样本(每个 5 个特征),第一层输出 3 个值,第二层输出 1 个值。打印每层的输入输出形状。