4.1.5 ベクトル空間と線形変換【選択】
この節の内容は、理解を深めるのに役立ちます。AI プロジェクトをすぐに始めたいなら、いったん飛ばして、あとで関連する概念が出てきたときに戻ってきても大丈夫です。
学習目標
- 線形独立、基底、次元の意味を理解する
- 線形変換の行列表現を理解する
- 特異値分解(SVD)を直感的に理解する
まず、とても大事な学習イメージについて
この節は選択で、名前も少し抽象的なので、初心者は最初からペースが落ちやすいです。
この節でいちばん大事なのは、線形代数の高度な理論を全部完璧にすることではなく、まずはもっと高い視点を持つことです。
- これまでのベクトル、行列、固有値は、より大きな枠組みの中でそれぞれ何を表しているのか
- なぜ「次元」「基底」「線形独立」という言葉が、後の AI で何度も出てくるのか
- なぜ SVD が多くの手法の土台になるのか
つまり、この節は次のようなものです。
前の 3 節で身につけた直感を、より高いレベルの理解の枠組みにまとめること。
この節と前の 3 節はどうつながるの?
前の 3 節が「ベクトルをどう表すか、行列がどう変換するか、固有値で特別な方向をどう見つけるか」だったなら、この節はそれらを少し上の視点から見直すものです。
なので、この授業は「理解を深めるための整理回」のようなものです。すぐに全部を完全理解する必要はありませんが、学べると前の概念がなぜ成り立つのかがより見えてきます。
先に読み解いておきたい略語と記号
| 用語 | 英語の正式名称 | 初学者向けの意味 |
|---|---|---|
SVD | Singular Value Decomposition | 特異値分解。行列を方向、強さ、再構成のステップに分ける |
PCA | Principal Component Analysis | 主成分分析。データの重要な方向を見つけ、少ない次元で表す |
NLP | Natural Language Processing | 自然言語処理。テキストや言語を扱う AI 手法 |
LSA | Latent Semantic Analysis | 潜在意味解析。SVD を使って文章中の隠れたトピック構造を探す古典的手法 |
V^T / Vt | V transpose | V の転置。行と列を入れ替えたもの。NumPy ではよく Vt と呼ばれる |
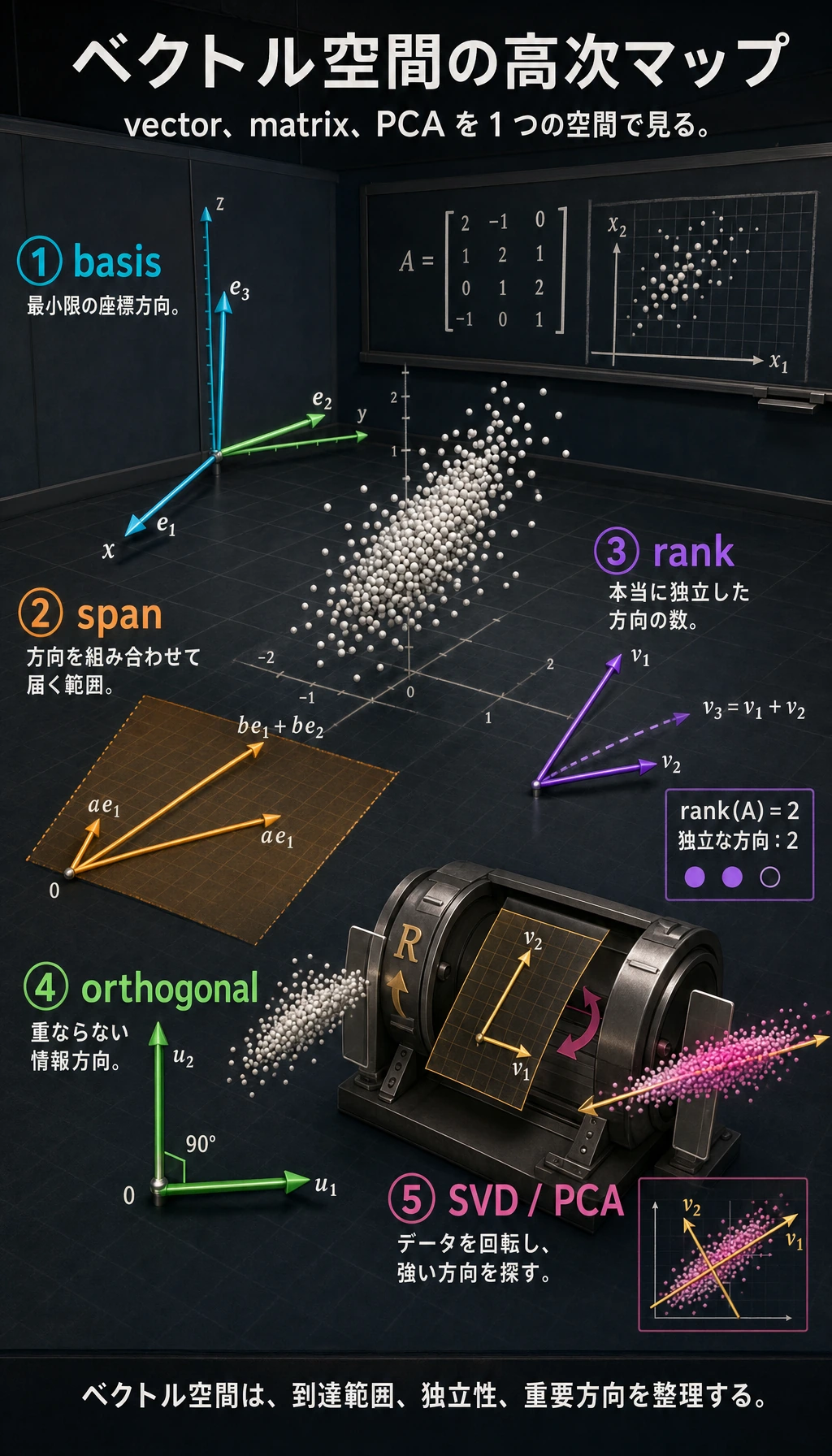
rank | Matrix rank | 行列の中に、本当に独立した方向がいくつあるか |
basis | Basis vectors | 空間を表すための、最小限で冗長でない座標方向 |
span | Span of vectors | 与えられたベクトルを組み合わせて到達できる範囲 |
orthogonal | Perpendicular / independent directions | 互いに重ならない方向。AI では情報をきれいに分けるイメージで使われる |
full_matrices=False | Compact SVD mode | NumPy に必要な部分だけを返してもらう指定。再構成時に行列サイズを合わせやすい |
np.linalg | NumPy linear algebra module | NumPy の線形代数ツール群。階数、連立方程式、固有値、SVD などを扱う |
| 低ランク近似 | Low-rank approximation | 重要な特異値だけを残し、弱い細部を捨てて少ない情報で元の行列を近似すること |
この節のコード実行前提:以下のコードは Notebook 形式を想定しています。順番に実行する場合、後のコードブロックは前で定義した np、plt、変数を再利用できます。1 つのコードブロックだけを新しい .py ファイルにコピーする場合は、先に次を追加してください。
import numpy as np
import matplotlib.pyplot as plt
np は NumPy の標準的な短縮名です。NumPy は Python で配列や線形代数を扱う基礎ライブラリです。plt は Matplotlib pyplot のよく使われる短縮名で、図やグラフを描くために使います。
一、線形独立——「冗長でない」ベクトル
線形独立とは?
直感:ベクトルの集まりが「線形独立」であるとは、それぞれのベクトルが独自の情報を持っていて、どれも余計ではないという意味です。
初心者向けのたとえ
「線形独立」は、チームの役割分担のように考えると分かりやすいです。
- チームの各メンバーがそれぞれ違う能力を持っていれば、無駄がない
- 2 人がまったく同じ仕事をしているなら、そのうち 1 人は少し重複しています
だから、線形独立でまず覚えたいのは、厳密な定義よりもこの感覚です。
このベクトルの集まりの中に、ほかのベクトルですでに表せる、重複したものはあるか?
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 線形独立の例:右向きと上向きで、方向がまったく違う
v1 = np.array([1, 0])
v2 = np.array([0, 1])
# 線形従属の例:v2 は v1 の 2 倍で、方向がまったく同じ
u1 = np.array([1, 2])
u2 = np.array([2, 4]) # u2 = 2 * u1, 冗長!
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
# 線形独立
ax = axes[0]
ax.quiver(0, 0, v1[0], v1[1], angles='xy', scale_units='xy', scale=1,
color='steelblue', width=0.01, label='v1 = [1, 0]')
ax.quiver(0, 0, v2[0], v2[1], angles='xy', scale_units='xy', scale=1,
color='coral', width=0.01, label='v2 = [0, 1]')
ax.set_xlim(-0.5, 2)
ax.set_ylim(-0.5, 2)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.legend()
ax.set_title('線形独立\n2 つの方向が異なり、冗長性がない')
# 線形従属
ax = axes[1]
ax.quiver(0, 0, u1[0], u1[1], angles='xy', scale_units='xy', scale=1,
color='steelblue', width=0.01, label='u1 = [1, 2]')
ax.quiver(0, 0, u2[0], u2[1], angles='xy', scale_units='xy', scale=1,
color='coral', width=0.01, label='u2 = [2, 4]')
ax.set_xlim(-0.5, 3)
ax.set_ylim(-0.5, 5)
ax.set_aspect('equal')
ax.grid(True, alpha=0.3)
ax.legend()
ax.set_title('線形従属\nu2 = 2×u1, 完全に冗長')
plt.tight_layout()
plt.show()
AI における意味
| 場面 | 線形独立の意味 |
|---|---|
| 特徴量エンジニアリング | 2 つの特徴量が線形従属(例:「温度(℃)」と「温度(℉)」)なら、片方は冗長 |
| PCA による次元削減 | 主成分どうしは互いに直交しており(線形独立)、それぞれが独自の情報を持つ |
| ニューラルネットワーク | 重み行列の列が線形従属なら、いくつかのニューロンが冗長になっている可能性がある |
行列の階数で判定する
行列の階数(rank) = 行列の中で線形独立な行(または列)の最大数です。
# 3 列が線形独立
A = np.array([[1, 0, 0],
[0, 1, 0],
[0, 0, 1]])
print(f"A の階数: {np.linalg.matrix_rank(A)}") # 3(フルランク)
# 第 3 列 = 第 1 列 + 第 2 列、冗長!
B = np.array([[1, 0, 1],
[0, 1, 1],
[0, 0, 0]])
print(f"B の階数: {np.linalg.matrix_rank(B)}") # 2(フルランクではない)
期待される出力:
A の階数: 3
B の階数: 2
ここで「フルランク」は、まず「無駄な列がない」と考えると分かりやすいです。行列 B には 3 列ありますが、独立した方向は 2 つだけなので、有効な情報の次元は 2 です。
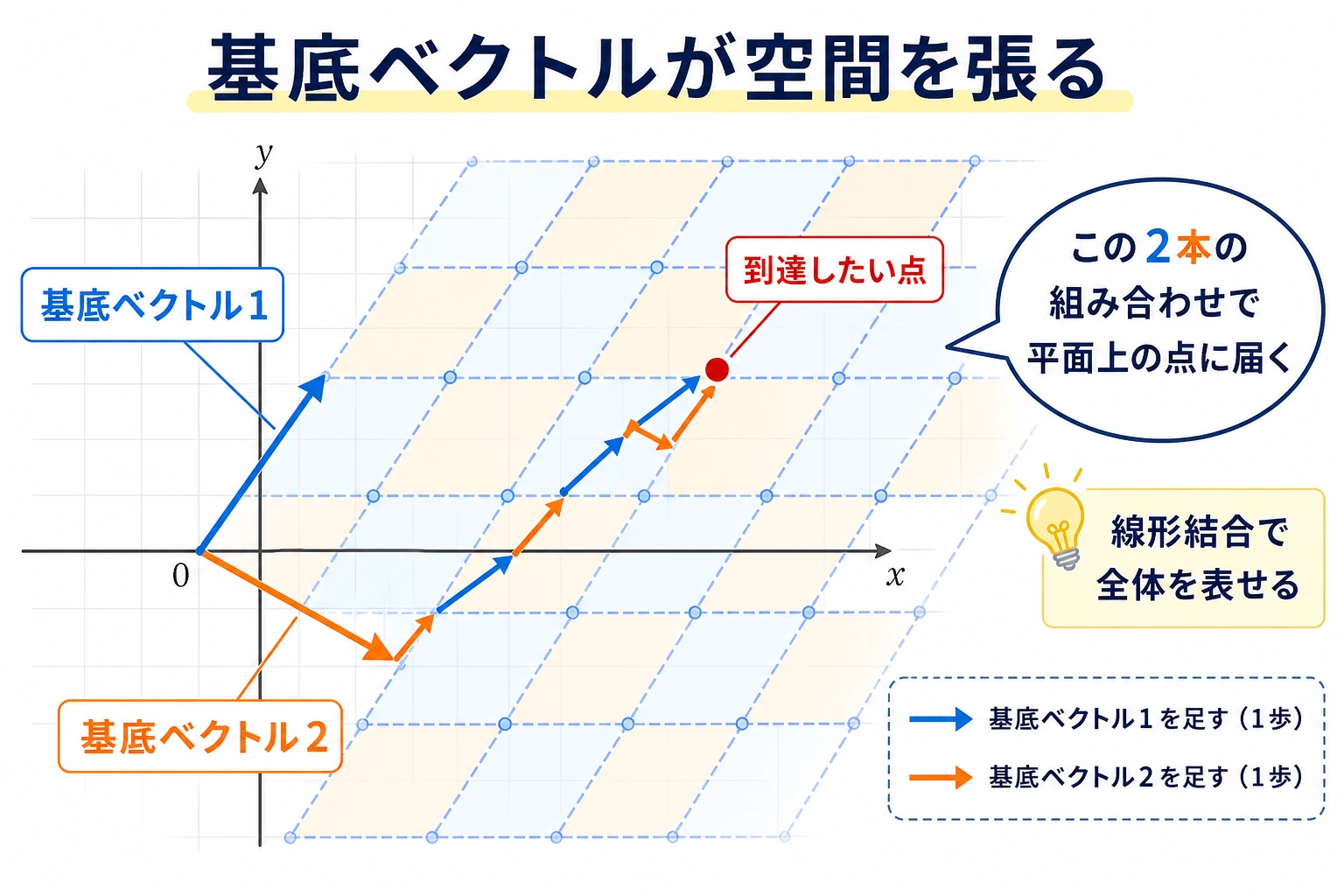
二、基底と次元——空間を表す「座標系」
基底(Basis)
基底 = 線形独立なベクトルの集まりで、それらで空間全体を「張る」ことができるもの(つまり、どんなベクトルもそれらの組み合わせで表せる)。
基底でまず覚えるべきなのは、用語より役割
基底は、次のように考えるとよいです。
- 最小限で、十分で、しかも冗長でない座標系
つまり、
- すべてを表せる
- でも余計な方向はない
これが、後の多くの AI 手法で「よりよい表現の基底」を探す理由です。
いちばんよく使う基底は 標準基底 です。
# 2 次元空間の標準基底
e1 = np.array([1, 0]) # x 方向
e2 = np.array([0, 1]) # y 方向
# どんな 2 次元ベクトルも標準基底で表せる
v = np.array([3, 5])
# v = 3 * e1 + 5 * e2
print(f"v = {v[0]} × e1 + {v[1]} × e2 = {v[0]*e1 + v[1]*e2}")
期待される出力:
v = 3 × e1 + 5 × e2 = [3 5]
標準基底以外も使えます。
# 別の基底に変える
b1 = np.array([1, 1])
b2 = np.array([1, -1])
# v = [3, 5] を新しい基底で表すと?
# v = c1 * b1 + c2 * b2
# 方程式を解く
B = np.column_stack([b1, b2])
coords = np.linalg.solve(B, v)
print(f"新しい基底での座標: {coords}") # [4, -1]
# 確認: 4*[1,1] + (-1)*[1,-1] = [4,4]+[-1,1] = [3,5] ✓
期待される出力:
新しい基底での座標: [ 4. -1.]
ここで大事なのは、ベクトルそのものは動いていないという点です。変わったのは、それを説明する座標系です。AI で「表現」という言葉が重要になる理由もここにあります。
次元(Dimension)
次元 = 基底ベクトルの個数 = 空間を表すのに必要な最小の座標数。
なぜ「次元」は AI でよく出るの?
AI では、次の 2 つがよく問題になります。
- 今の表現にどれだけ自由度があるか
- 次元を下げても、できるだけ情報を失わずに済むか
だから、AI における次元は単なる幾何の言葉ではなく、
多くの場合、次のような意味を持ちます。
- 計算コスト
- 情報量
- モデルの複雑さ
| 空間 | 次元 | 例 |
|---|---|---|
| 直線 | 1 | 温度の目盛り |
| 平面 | 2 | 地図上の位置 |
| 3 次元空間 | 3 | 現実世界の位置 |
| 単語ベクトル空間 | 100〜300 | 各単語の「意味の座標」 |
| 画像の画素空間 | 数万〜数百万 | 各画素が 1 つの次元 |
AI では「高次元空間」という言い方をよくします。たとえば、28×28 の手書き数字画像は、784 次元空間の 1 点です。PCA の本質は、新しい「基底」(主成分)を見つけて、より少ない次元(たとえば 2 次元)でデータを近似的に表せるようにすることです。
三、線形変換の行列表現
線形変換 = 行列
とても重要な結論があります。どんな線形変換も、行列で表せる のです。
これが AI で特に重要な理由
なぜなら、見た目は違っても、いろいろなものを同じ表現にまとめられるからです。
- 回転
- 拡大縮小
- 射影
- ニューラルネットワークの 1 層
つまり、AI の中の多くの「層」は、本質的にはまず次のように見ることができます。
- ある種の線形変換 + その後の非線形処理
線形変換とは何でしょうか? それは、次の 2 条件を満たす変換 T です。
- T(a + b) = T(a) + T(b)(足し算を「外に出し入れ」できる)
- T(ka) = k·T(a)(スカラー倍を「外に出し入れ」できる)
# 回転、拡大縮小、射影、せん断... すべて線形変換
# 標準基底ベクトルが変換後にどこへ行くかを見れば、行列が分かる
# 90° 回転の変換:
# e1 = [1, 0] → [0, 1]
# e2 = [0, 1] → [-1, 0]
# 変換後の基底ベクトルを列に並べれば、それが変換行列!
R90 = np.array([[0, -1],
[1, 0]])
# 確認
print(R90 @ np.array([1, 0])) # [0, 1] ✓
print(R90 @ np.array([0, 1])) # [-1, 0] ✓
期待される出力:
[0 1]
[-1 0]
行列は「基底ベクトルをどこへ送るか」で完全に決まります。つまり行列は単なる数字の表ではなく、変換をコンパクトに表した説明書です。
変換の合成 = 行列の掛け算
45° 回転してから 2 倍に拡大する? 2 つの行列を掛け算するだけです。
# 45° 回転
theta = np.radians(45)
R45 = np.array([
[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)]
])
# 2 倍に拡大
S2 = np.array([
[2, 0],
[0, 2]
])
# まず回転して、次に拡大 = S2 @ R45(注意:右から左へ読む!)
combined = S2 @ R45
print(f"合成変換行列:\n{combined.round(3)}")
# ベクトルに適用
v = np.array([1, 0])
result = combined @ v
print(f"[1, 0] → {result.round(3)}") # ≈ [1.414, 1.414]
期待される出力:
合成変換行列:
[[ 1.414 -1.414]
[ 1.414 1.414]]
[1, 0] → [1.414 1.414]
S2 @ R45 @ v は右から左へ読みます。つまり、ベクトルは先に回転し、その後に拡大されます。この「右端の操作が先に起こる」というルールは、ニューラルネットワークで行列演算をつなぐときにも何度も出てきます。
四、SVD——行列分解の「スイスアーミーナイフ」
SVD とは?
特異値分解(SVD) は固有値分解の拡張で、どんな形の 行列にも使えます(正方行列に限りません)。
初心者向けのたとえ
SVD は、次のように考えるとよいです。
- 複雑な変換を、理解しやすい小さな動きに分けるもの
まるで、複雑な機械を分解して見るようなものです。
- まず、どう向きをそろえるか
- 次に、どう伸ばすか
- 最後に、どう目的の向きに戻すか
だからこそ、SVD は多くの AI 手法の土台になります。
- ただ「計算できる」だけではない
- 構造を説明するのにも向いている
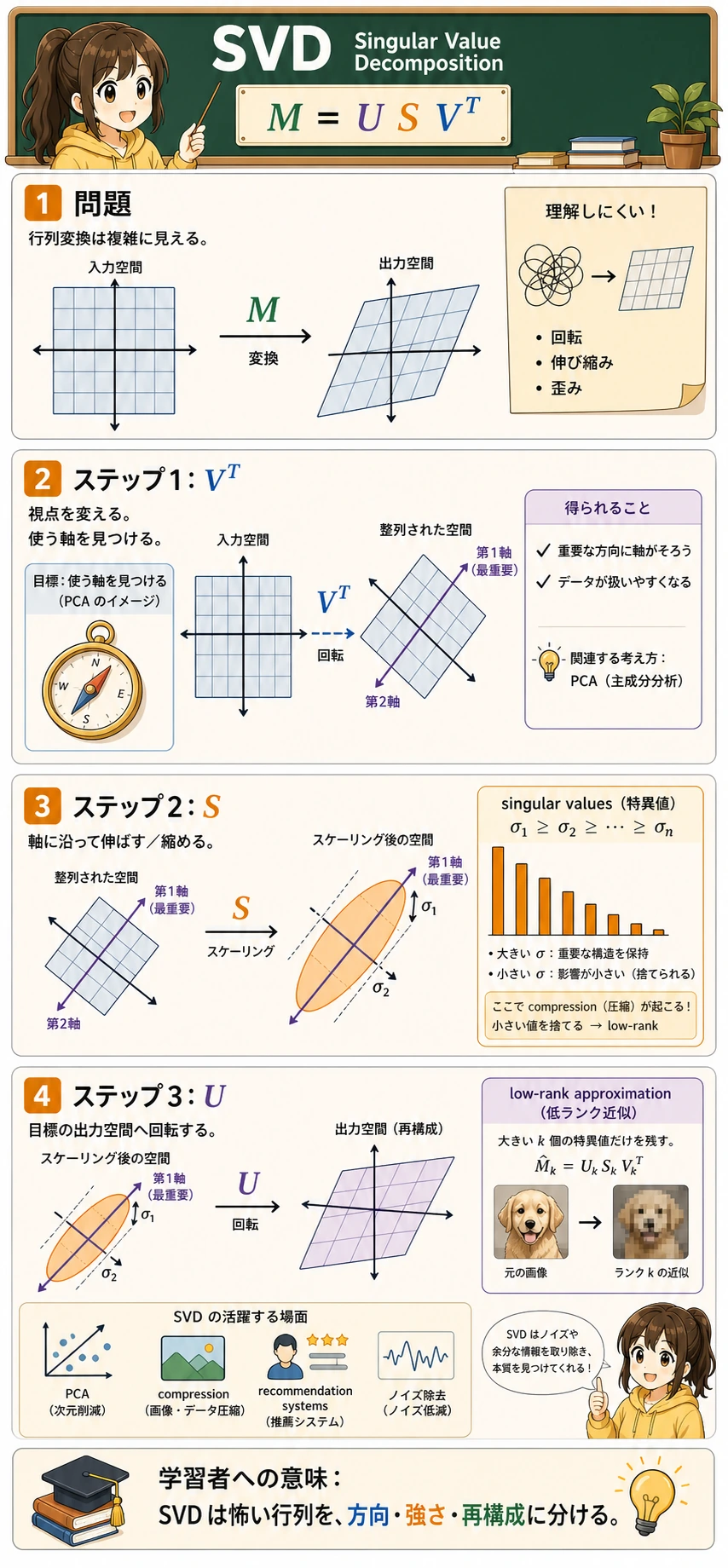
SVD は、行列 M を 3 つの行列の積に分解します。
M = U × S × V^T
ここで:
- U:左特異ベクトル(直交行列)
- S:特異値(対角行列で、大きい順に並ぶ)
- V^T:V の転置。右特異ベクトル行列を転置したもの
NumPy では、np.linalg.svd() は U, S, Vt を返します。S は対角行列ではなく 1 次元の特異値リストとして返るので、行列を再構成するときは通常 np.diag(S) で対角行列に変換します。
full_matrices=False は、NumPy にコンパクトな形で返してもらう指定です。初心者にとっては、こちらのほうが形を合わせやすくなります。
U:(行数, 特異値の個数)np.diag(S):(特異値の個数, 特異値の個数)Vt:(特異値の個数, 列数)
# 任意の行列の SVD
M = np.array([
[1, 2, 3],
[4, 5, 6],
]) # 2×3 行列
U, S, Vt = np.linalg.svd(M, full_matrices=False)
print(f"U の形状: {U.shape}") # (2, 2)
print(f"特異値 S: {S.round(3)}") # [9.508, 0.773]
print(f"Vt の形状: {Vt.shape}") # (2, 3)
# 確認: M ≈ U @ diag(S) @ Vt
reconstructed = U @ np.diag(S) @ Vt
print(f"\n再構成誤差: {np.linalg.norm(M - reconstructed):.10f}") # ≈ 0
期待される出力:
U の形状: (2, 2)
特異値 S: [9.508 0.773]
Vt の形状: (2, 3)
再構成誤差: 0.0000000000
1 つ目の特異値が 2 つ目よりかなり大きいので、この行列には強い主方向と、弱い補正方向があると見られます。「強い構造を先に残し、細部をあとで補う」という考え方が、SVD を圧縮や次元削減に使える理由です。
SVD の直感
SVD は、どんな変換も 3 段階に分けます。
SVD の応用:画像圧縮
SVD のいちばん分かりやすい応用は、少ないデータで画像を近似することです。
# グレースケール画像の例
# ここではランダム数でグレースケール画像を模擬する
rng = np.random.default_rng(seed=42)
image = rng.integers(0, 256, (100, 150)).astype(float)
# 少し構造を入れる(完全なランダムではない)
for i in range(100):
for j in range(150):
image[i, j] = 128 + 50 * np.sin(i/10) * np.cos(j/15) + rng.normal() * 20
print(f"元画像: {image.shape} = {image.size} 個の値")
# SVD 分解
U, S, Vt = np.linalg.svd(image, full_matrices=False)
print(f"特異値の個数: {len(S)}")
for k in [1, 5, 20, 100]:
compressed_size = k * (U.shape[0] + 1 + Vt.shape[1])
ratio = compressed_size / image.size * 100
print(f"k={k:3d}, 保存量は元画像の約 {ratio:5.1f}%")
# 特異値の数を変えて再構成
fig, axes = plt.subplots(1, 4, figsize=(16, 4))
for ax, k in zip(axes, [1, 5, 20, 100]):
# 先頭の k 個だけ残す
reconstructed = U[:, :k] @ np.diag(S[:k]) @ Vt[:k, :]
# 圧縮率 = 保存する数 / 元の数
original_size = image.size
compressed_size = k * (U.shape[0] + 1 + Vt.shape[1])
ratio = compressed_size / original_size * 100
ax.imshow(reconstructed, cmap='gray')
ax.set_title(f'k = {k}\n保存量: {ratio:.0f}%')
ax.axis('off')
plt.suptitle('SVD による画像圧縮:少ない特異値で近似する', fontsize=13)
plt.tight_layout()
plt.show()
期待されるテキスト出力:
元画像: (100, 150) = 15000 個の値
特異値の個数: 100
k= 1, 保存量は元画像の約 1.7%
k= 5, 保存量は元画像の約 8.4%
k= 20, 保存量は元画像の約 33.5%
k=100, 保存量は元画像の約 167.3%
解釈:特異値を最初の 20 個だけ残しても、画像の主要な構造はかなり再現できます。保存する数も大きく減ります。一方で k=100 では全特異値を残すため再構成は最も正確ですが、U、S、Vt を別々に保存すると元画像より大きくなることがあります。圧縮として意味があるのは、k が元の階数より十分小さい場合です。
AI における SVD の応用
| 応用 | 説明 |
|---|---|
| 画像圧縮 | 少数の特異値で元画像を近似する |
| レコメンドシステム | 行列分解(Netflix の推薦など) |
| NLP | 潜在意味解析(LSA)で SVD を使って単語-文書行列を次元削減する |
| データの次元削減 | SVD は PCA の土台になる |
| 擬似逆行列 | 過剰決定系・非正方系の方程式を解く |
実務でよく問われるのは、「完全に再構成できるか」ではなく、むしろ次の問いです。
近似がぼやけすぎたり、情報を失いすぎたりする前に、重要な方向をいくつ残すべきか?
この問いは、モデル圧縮、Embedding 圧縮、レコメンドシステム、検索システムでも繰り返し出てきます。
初学者がまず覚えるとよい見分け表
| この言葉を見たら | まずこう考える |
|---|---|
| 線形独立 | 情報の冗長性があるか |
| 基底 | 最小限で十分な座標系 |
| 次元 | この表現に自由度はいくつあるか |
| 階数 | このデータに本当に有効な情報の次元はいくつか |
| SVD | 複雑な行列を、理解しやすい動きに分けるもの |
この表は初心者にとても役立ちます。なぜなら、あいまいで発散しやすい用語を、まずは使える直感にまとめられるからです。
最小の「低ランク近似」の例をもう一度見る
M = np.array([
[5.0, 4.8, 0.1],
[4.9, 5.1, 0.2],
[0.2, 0.1, 4.9],
])
U, S, Vt = np.linalg.svd(M, full_matrices=False)
# いちばん大きい特異値 1 個だけを残す
k = 1
Mk = U[:, :k] @ np.diag(S[:k]) @ Vt[:k, :]
print("元の行列:\n", np.round(M, 3))
print("\n低ランク近似:\n", np.round(Mk, 3))
print("\n再構成誤差:", round(np.linalg.norm(M - Mk), 4))
期待される出力:
元の行列:
[[5. 4.8 0.1]
[4.9 5.1 0.2]
[0.2 0.1 4.9]]
低ランク近似:
[[4.895 4.894 0.294]
[4.997 4.997 0.3 ]
[0.297 0.297 0.018]]
再構成誤差: 4.8961
この例は初心者にとても向いています。なぜなら、次のことが見えるからです。
- SVD は単に行列を分解するためだけのものではない
- どの構造を重要視して残すか、どれだけ情報が失われるかを教えてくれる
kが小さすぎると、最も強いパターンは残りますが、重要な小さなパターンが消えることもある
これこそが、多くの AI シーンにある共通の考え方です。
- 圧縮
- 次元削減
- 近似表現
ここまで学んだら、次に何へつなげるのがよい?
第 4 ステップまで読んだら、次に持っていくべきなのは、さらに多くの数式ではなく、次の問いです。
- これらの数学の対象は、機械学習の中で実際にどう使われるのか?
- どんなときにベクトルは特徴量になり、行列は重みになるのか?
- なぜ確率、勾配、そしてこれらの線形代数の対象が、同じモデルの中で一緒に出てくるのか?
次に読むのにおすすめなのは、通常こちらです。
もし今この節がまだ少し抽象的に感じるなら、まず何をつかむべき?
まず押さえるべきなのは、すべての定義ではなく、この 4 つです。
- 線形独立 = 冗長性がない
- 基底 = 最小限で十分な表し方
- 次元 = 表すのにいくつの自由度が必要か
- SVD = 複雑な行列変換を分解する
線形代数の 4 つの授業で、あなたは次を学びました。
- ベクトル:AI における基本データ単位。余弦類似度は方向の似ている度合いを測る
- 行列:データをまとめて変換する。ニューラルネットワーク各層の中心的な操作
- 固有値:データの最も重要な方向を見つける。PCA による次元削減
- ベクトル空間(この節):次元、基底、SVD を理解する
これらの概念は、今後機械学習、深層学習、NLP を学ぶ中で何度も出てきます。すべての細部を急いで覚える必要はありません。実践を重ねるにつれて、理解はどんどん深まっていきます。
まとめ
| 概念 | 直感 | NumPy |
|---|---|---|
| 線形独立 | 冗長性のないベクトルの集まり | np.linalg.matrix_rank(A) |
| 基底 | 空間を表す座標系 | — |
| 次元 | いくつの座標が必要か | A.shape |
| 線形変換 | 行列の掛け算 | A @ v |
| SVD | 任意の行列 = 回転 × 拡大縮小 × 回転 | np.linalg.svd(A) |
| 行列の階数 | 有効な次元数 | np.linalg.matrix_rank(A) |
この節でいちばん持ち帰ってほしいこと
- 線形独立で最も大事な直感は「情報の冗長性があるか」
- 基底で最も大事な直感は「最小限で十分な座標系」
- 次元で最も大事な直感は「この表現にどれだけ自由度が必要か」
- SVD で最も大事な直感は「複雑な変換を、理解しやすいいくつかの動きに分けること」
ハンズオン練習
練習 1:線形独立を判定する
次の 3 組のベクトルのうち、どれが線形独立か? np.linalg.matrix_rank() で確認してください。
# 第 1 組
g1 = np.array([[1, 2], [3, 6]])
# 第 2 組
g2 = np.array([[1, 0], [0, 1]])
# 第 3 組
g3 = np.array([[1, 2, 3], [4, 5, 6], [5, 7, 9]])
for name, matrix in {"g1": g1, "g2": g2, "g3": g3}.items():
rank = np.linalg.matrix_rank(matrix)
dimension = matrix.shape[0]
print(f"{name}: rank={rank}, dimension={dimension}, independent={rank == dimension}")
期待される出力:
g1: rank=1, dimension=2, independent=False
g2: rank=2, dimension=2, independent=True
g3: rank=2, dimension=3, independent=False
練習 2:SVD 圧縮
50×80 のランダム行列に SVD で低ランク近似を行い、k の値ごとの再構成誤差の曲線を描いてください。
rng = np.random.default_rng(seed=42)
M = rng.normal(size=(50, 80))
U, S, Vt = np.linalg.svd(M, full_matrices=False)
errors = []
for k in range(1, 51):
reconstructed = U[:, :k] @ np.diag(S[:k]) @ Vt[:k, :]
error = np.linalg.norm(M - reconstructed)
errors.append(error)
plt.plot(range(1, 51), errors, marker="o")
plt.xlabel("k:残す特異値の個数")
plt.ylabel("再構成誤差")
plt.title("SVD の再構成誤差は k が増えると下がる")
plt.grid(alpha=0.3)
plt.show()
期待される結果:曲線は全体として下がります。特異値を多く残すほど情報が多く残るため、再構成誤差は小さくなります。
練習 3:変換の合成
2 つの 2×2 変換行列を作ってください。まず拡大縮小(x を 2 倍、y はそのまま)、次に 30° 回転です。それらを掛け合わせて合成行列を作り、三角形の頂点の集合に変換を適用して描画してください。
theta = np.radians(30)
scale = np.array([[2, 0], [0, 1]])
rotate = np.array([
[np.cos(theta), -np.sin(theta)],
[np.sin(theta), np.cos(theta)],
])
# 先に拡大縮小し、次に回転する:右端の操作が先に起こる。
combined = rotate @ scale
triangle = np.array([
[0, 0],
[1, 0],
[0.5, 1],
[0, 0],
])
transformed = triangle @ combined.T
print("合成行列:\n", np.round(combined, 3))
print("変換後の頂点:\n", np.round(transformed, 3))
plt.plot(triangle[:, 0], triangle[:, 1], "o-", label="元の三角形")
plt.plot(transformed[:, 0], transformed[:, 1], "o-", label="変換後の三角形")
plt.axis("equal")
plt.grid(alpha=0.3)
plt.legend()
plt.show()
期待されるテキスト出力:
合成行列:
[[ 1.732 -0.5 ]
[ 1. 0.866]]
変換後の頂点:
[[0. 0. ]
[1.732 1. ]
[0.366 1.366]
[0. 0. ]]