4.3.5 連鎖律と逆伝播のプレビュー
連鎖律は、ある核心的な問題を説明します。何百層もあるニューラルネットワークで、損失関数を各パラメータで微分するにはどうすればよいのでしょうか? その答えが逆伝播です。これは本質的に、連鎖律を体系的に適用したものです。
学習目標
- 連鎖律を理解する——複合関数の微分の仕方
- シンプルな2層ネットワークで逆伝播を手計算する
- 計算グラフを理解する——なぜ PyTorch が必要なのか
- 第6ステージの深層学習に備える
まず、とても大事な学習イメージを先に伝えます
この節は、第4ステージの中で初心者が一気に不安になりやすい部分です。
なので、まず最初に押さえるべきなのは、式の1つ1つではなく、次の考え方です。
- 複雑なネットワークも、実はたくさんの簡単な手順がつながったもの
- 逆伝播は不思議なアルゴリズムではなく、各層で連鎖律を順番に使っているだけ
- PyTorch の
backward()は、その作業を自動でやってくれているだけ
まず地図を作ろう
このレッスンは、第4ステージから第6ステージの深層学習へ進むための橋です。
もし前の節で学んだのが:
- 導関数:ある量がどう変わるか
- 勾配:たくさんの量が一緒にどう変わるか
- 勾配降下法:パラメータをどう更新するか
なら、この節で補うべきなのは:
- たくさんの層があるネットワークで、勾配をどうやって順番に計算して戻すのか
連鎖律——「玉ねぎの皮むき法」
直感
もし関数が「入れ子」構造になっているなら、つまり外側の中にさらに別の関数があるなら、その導関数は1層ずつはがしていき、各層の導関数を掛け合わせることで求めます。
連鎖律:dy/dx = (dy/du) × (du/dx)
「y の x に対する変化率 = y の u に対する変化率 × u の x に対する変化率」
初心者向けのたとえ
連鎖律は、まず歯車の列だと思うとわかりやすいです。
- 最初の歯車が少し動く
- すると次の歯車が動く
- さらにその次も動く
つまり、最後の量がどう変わるかは、
途中の各層が「変化をどれだけ伝えるか」によって決まります。
だから連鎖律の基本動作は次の2つです。
- 1層ずつ内側へ分解する
- 各層の変化率を順番に掛ける
生活の直感
給料が10%上がり、物価が5%上がると、実際の購買力はどう変わるでしょうか?
- 給料の変化 → 財布に影響 → 購買力に影響
- 全体の変化 = 給料の変化率 × 変換率
各段階の変化率を掛け合わせると、全体の変化率になります。
計算例
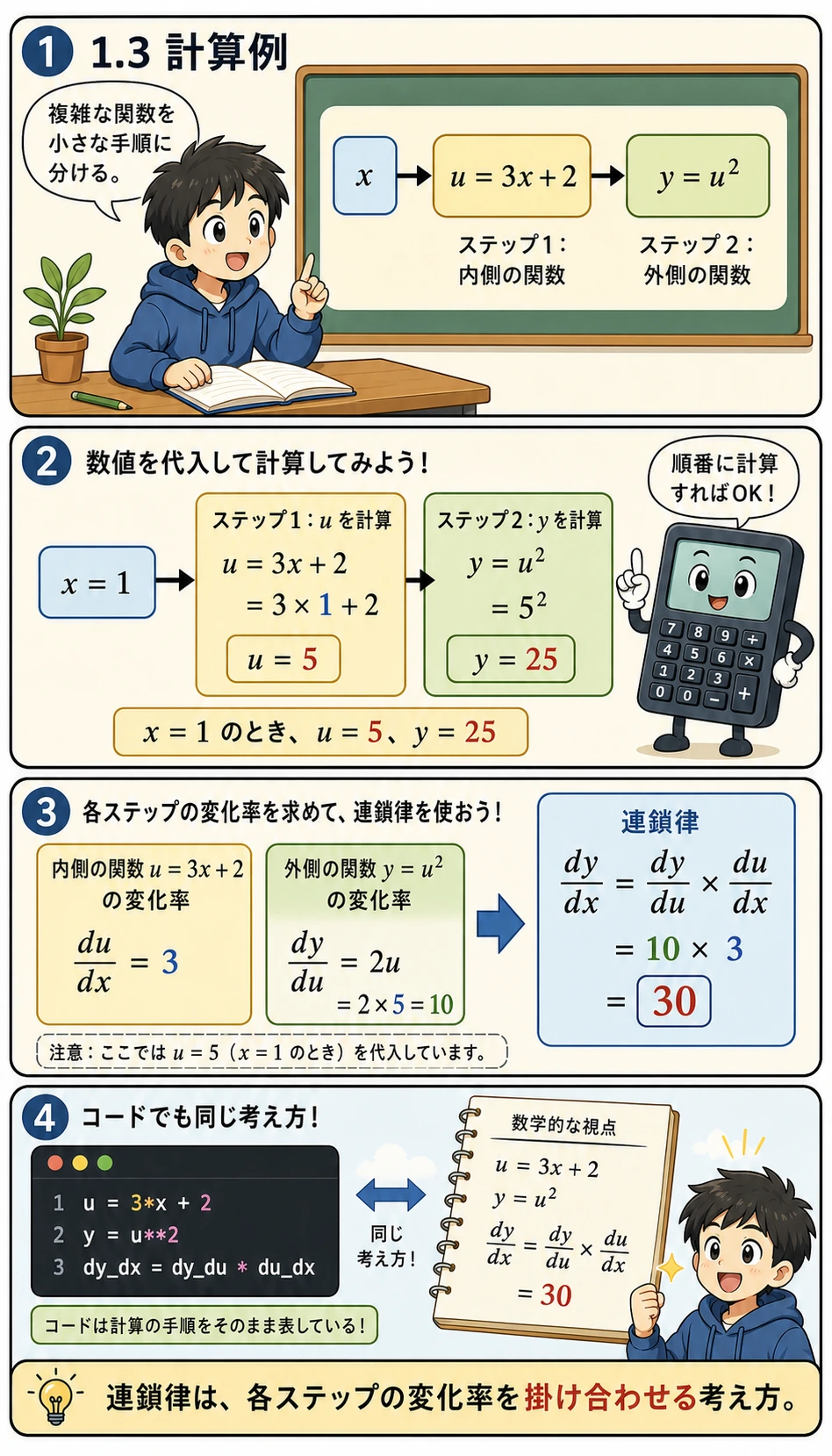
まずコードを見る前に、この例を小さな流れ作業として見てみましょう。
u = 3x + 2は内側のステップで、xが少し変わるとuがどう変わるかを表しますy = u²は外側のステップで、uが少し変わるとyがどう変わるかを表しますdy_dxは「元の入力xが少し変わったとき、最終出力yがどれだけ変わるか」という意味ですnumerical_derivativeは確認用です。xを少し左右に動かして、差分から傾きを近似します
つまり下のコードは、答えを計算しているだけではありません。関数の分解、公式、数値確認という3つの見方で同じ内容を確かめています。
import numpy as np
# 例:y = (3x + 2)²
# 分解:u = 3x + 2, y = u²
# dy/dx = dy/du × du/dx = 2u × 3 = 6(3x + 2)
# 方法1:連鎖律
def chain_rule_example(x):
u = 3 * x + 2 # 内側の関数
y = u ** 2 # 外側の関数
du_dx = 3 # 内側の関数の導関数
dy_du = 2 * u # 外側の関数の導関数
dy_dx = dy_du * du_dx # 連鎖律
return y, dy_dx
# 方法2:数値で確認
def numerical_derivative(f, x, h=1e-7):
return (f(x + h) - f(x - h)) / (2 * h)
f = lambda x: (3*x + 2)**2
x0 = 1
y, dy_dx_chain = chain_rule_example(x0)
dy_dx_numerical = numerical_derivative(f, x0)
print(f"x = {x0}")
print(f" 連鎖律: dy/dx = {dy_dx_chain}")
print(f" 数値確認: dy/dx = {dy_dx_numerical:.4f}")
多段の連鎖律
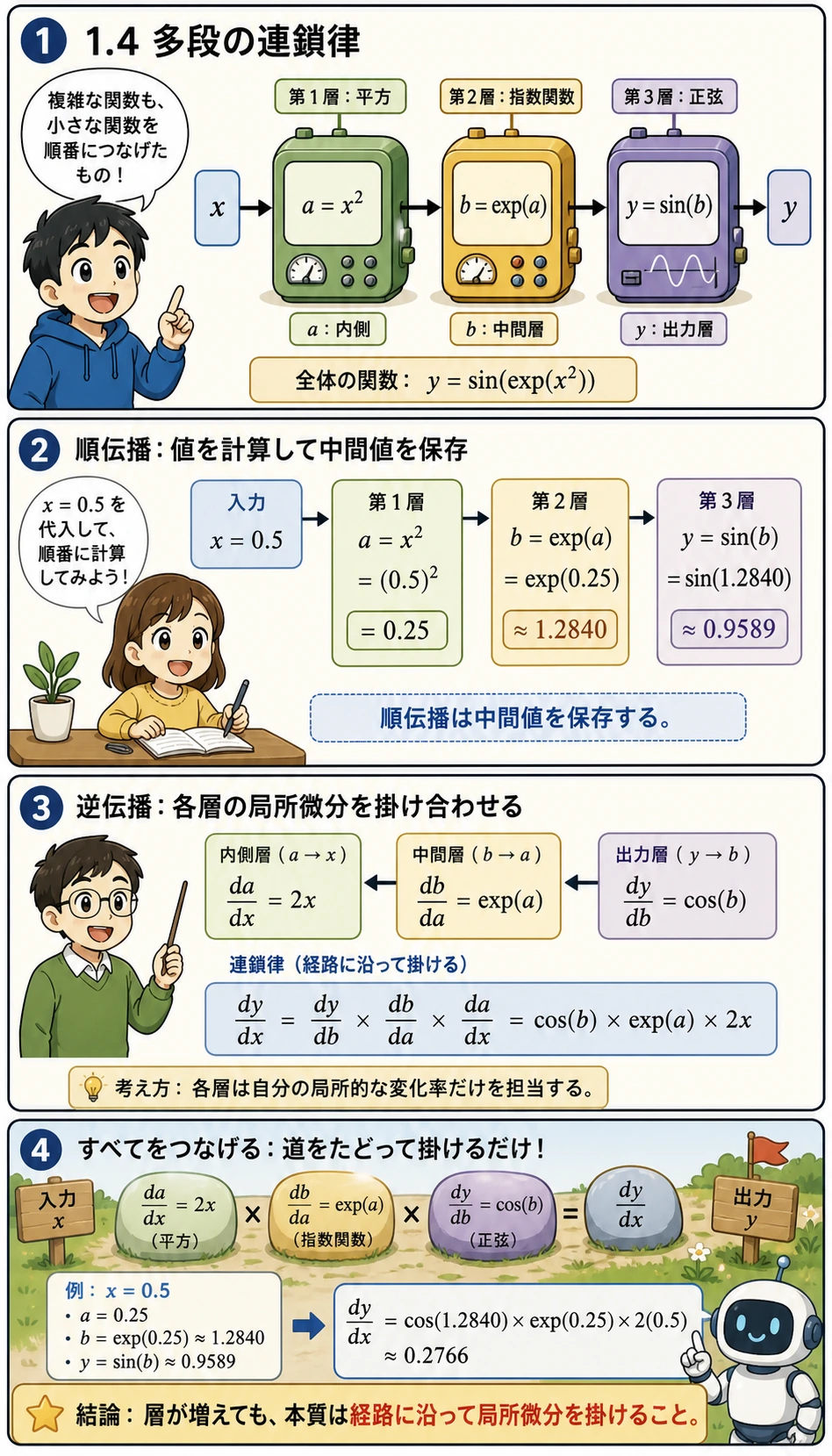
もっと多くの層が入れ子になっていたらどうでしょう? もちろん同じように、1層ずつはがします。
- まず順方向に計算して、
a、次にb、最後にyを得ます - 次に各ステップの局所的な導関数、
da_dx、db_da、dy_dbを計算します - 最後に、出力から入力へ戻る経路に沿って、それらの導関数を掛け合わせます
これは、あとでニューラルネットワークを見るときにもそのまま使う考え方です。深いモデルとは、別世界の数学ではなく、単に経路が長くなったものです。
# y = sin(exp(x²))
# 分解:a = x², b = exp(a), y = sin(b)
# dy/dx = dy/db × db/da × da/dx
# = cos(b) × exp(a) × 2x
x0 = 0.5
a = x0 ** 2
b = np.exp(a)
y = np.sin(b)
da_dx = 2 * x0
db_da = np.exp(a)
dy_db = np.cos(b)
dy_dx = dy_db * db_da * da_dx
# 数値確認
f = lambda x: np.sin(np.exp(x**2))
dy_dx_num = numerical_derivative(f, x0)
print(f"連鎖律: {dy_dx:.6f}")
print(f"数値確認: {dy_dx_num:.6f}")
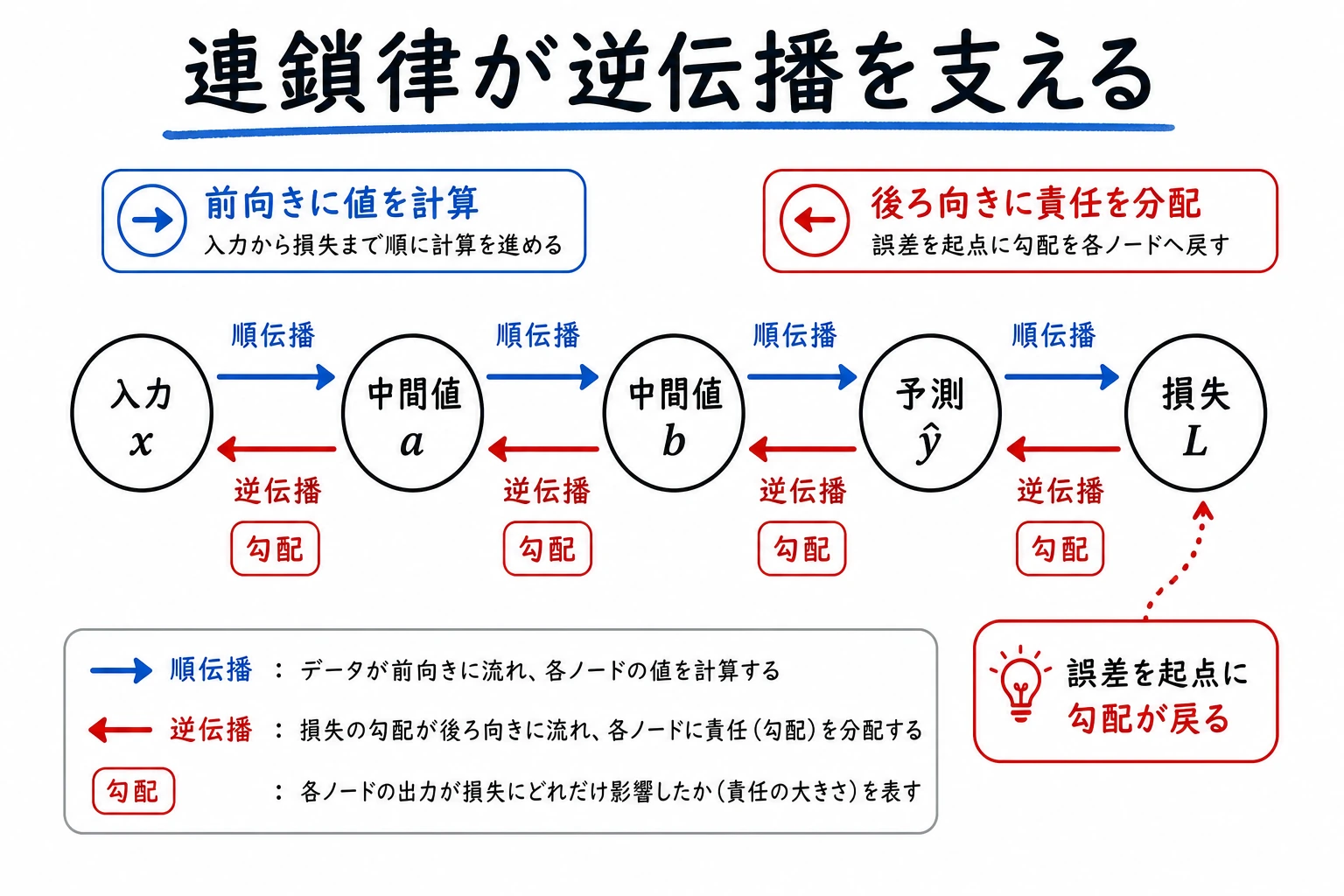
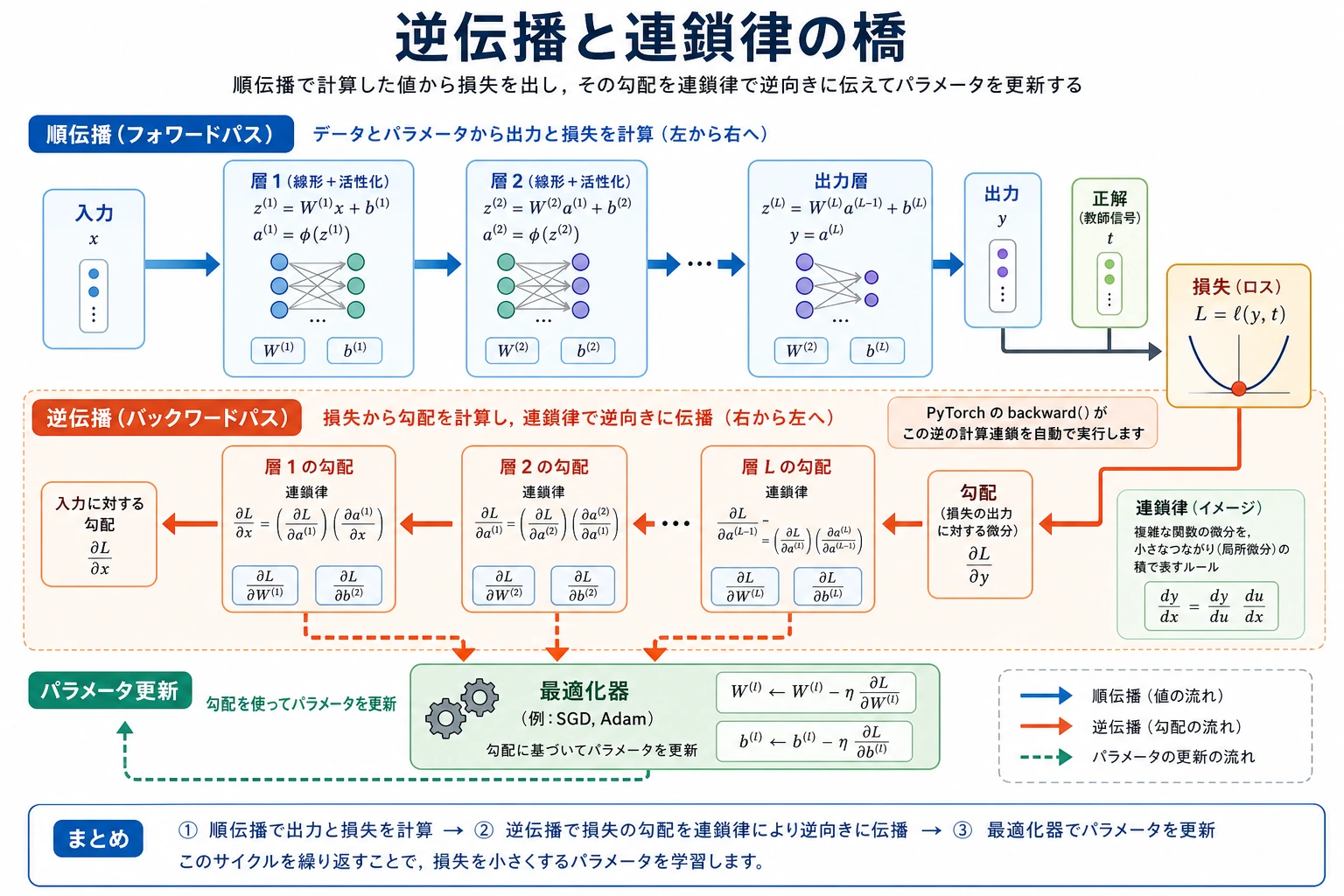
逆伝播——連鎖律の体系化
2層のニューラルネットワーク
順伝播(Forward Pass)
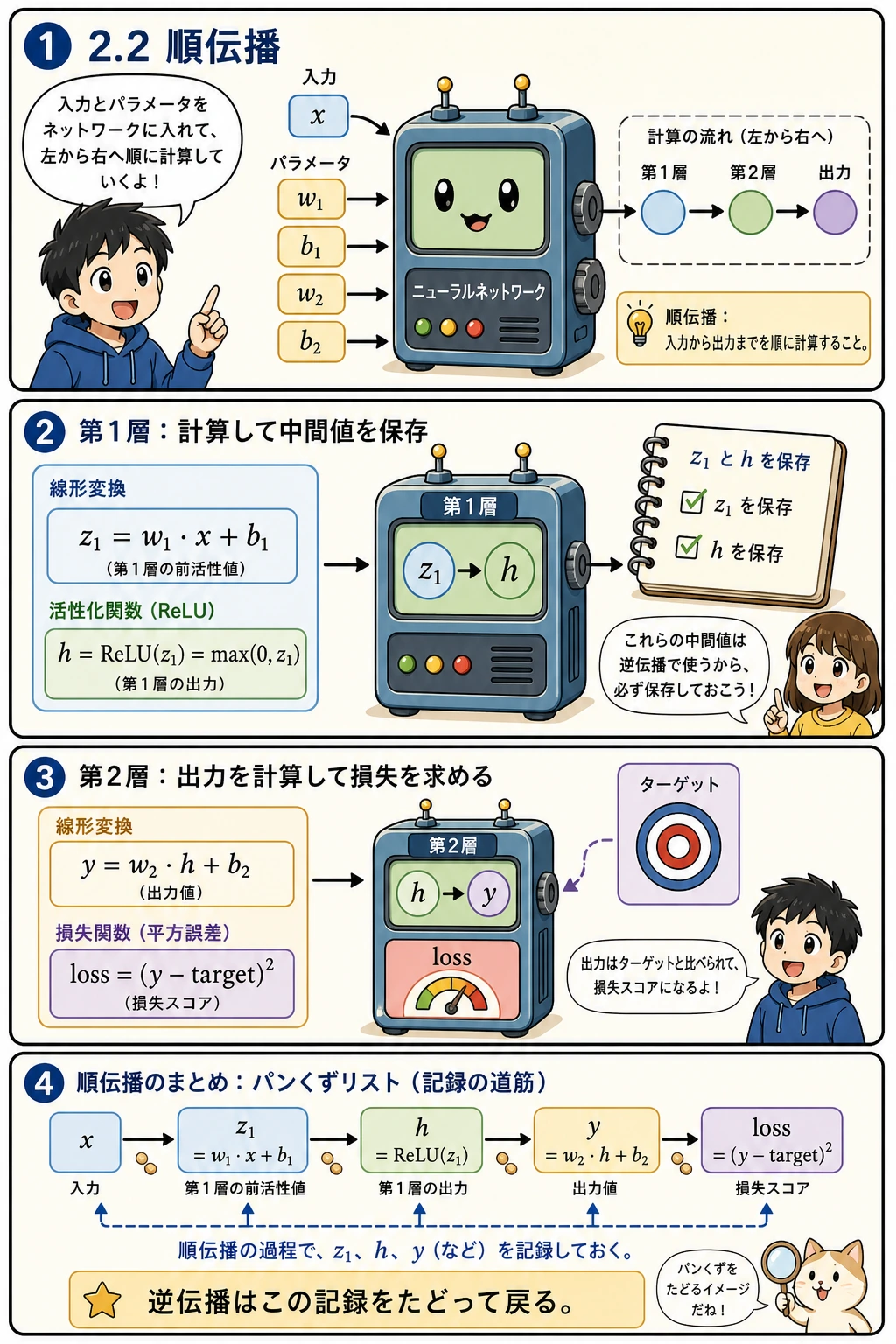
順伝播とは、「入力から予測へ、さらに損失へ向かって計算すること」です。この小さなネットワークで大事なのは、モデルの大きさではなく、中間値を保存する習慣です。
z1は活性化関数に入る前の値ですhはReLUを通った後の隠れ表現ですyはモデルの予測ですlossは予測がどれだけ外れているかを表します
これらの値が、逆伝播で戻るときの「道しるべ」になります。
# 入力と目標値
x = 2.0
target = 1.0
# パラメータ
w1 = 0.5
b1 = 0.1
w2 = -0.3
b2 = 0.2
# --- 順伝播 ---
# 第1層:線形 + ReLU
z1 = w1 * x + b1
h = max(0, z1) # ReLU
# 第2層:線形
y = w2 * h + b2
# 損失
loss = (y - target) ** 2
print("=== 順伝播 ===")
print(f"z1 = w1*x + b1 = {w1}*{x} + {b1} = {z1}")
print(f"h = ReLU(z1) = {h}")
print(f"y = w2*h + b2 = {w2}*{h} + {b2} = {y}")
print(f"loss = (y - target)² = ({y} - {target})² = {loss:.4f}")
なぜ先に順伝播を計算してから、逆伝播を考えるのか?
それは、逆伝播は何もないところから起こるわけではないからです。
まず順伝播で、次の中間値を計算しておく必要があります。
z1hyloss
なので、理解しやすい見方はこうです。
- 順伝播は、通り道を作る作業
- 逆伝播は、その通り道に沿って勾配を1層ずつ戻す作業
逆伝播(Backward Pass)
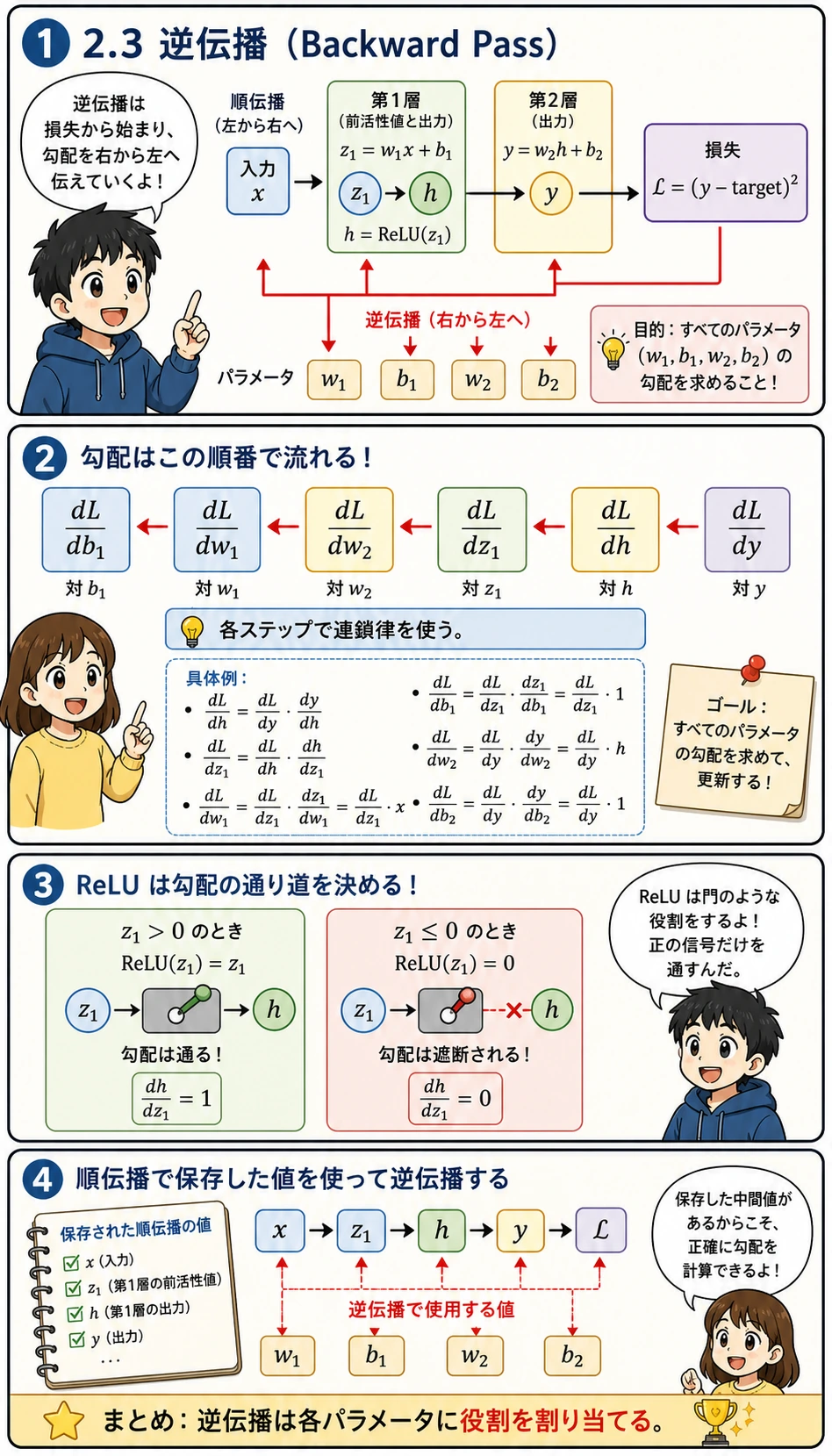
損失から始めて、各パラメータの勾配を後ろ向きに計算します。
dL_dw1 のような記号は、「損失 L がパラメータ w1 にどれだけ敏感か」と読むと理解しやすいです。絶対値が大きければ、そのパラメータを変えると損失も大きく変わります。0 に近ければ、今の状態では影響が小さいということです。
そのため、逆伝播は「責任を割り当てる」作業だと考えられます。
- 損失から始める
- 損失が出力にどう依存しているかを見る
- 出力がさらに前の値にどう依存しているかを見る
- 各ステップの局所微分を掛けながら、すべてのパラメータへ勾配を戻す
特に ReLU のゲートは重要です。z1 <= 0 の場合、その経路の勾配は 0 になります。
# --- 逆伝播 ---
# 最後の層から始めて、連鎖律で1層ずつ戻る
# dL/dy
dL_dy = 2 * (y - target)
print(f"\n=== 逆伝播 ===")
print(f"dL/dy = 2*(y-target) = {dL_dy:.4f}")
# dL/dw2 = dL/dy × dy/dw2 = dL/dy × h
dL_dw2 = dL_dy * h
print(f"dL/dw2 = dL/dy × h = {dL_dy:.4f} × {h} = {dL_dw2:.4f}")
# dL/db2 = dL/dy × dy/db2 = dL/dy × 1
dL_db2 = dL_dy * 1
print(f"dL/db2 = dL/dy × 1 = {dL_db2:.4f}")
# dL/dh = dL/dy × dy/dh = dL/dy × w2
dL_dh = dL_dy * w2
print(f"dL/dh = dL/dy × w2 = {dL_dy:.4f} × {w2} = {dL_dh:.4f}")
# dL/dz1 = dL/dh × dh/dz1(ReLU の導関数:z1>0 のとき 1、それ以外は 0)
relu_grad = 1.0 if z1 > 0 else 0.0
dL_dz1 = dL_dh * relu_grad
print(f"dL/dz1 = dL/dh × relu'(z1) = {dL_dh:.4f} × {relu_grad} = {dL_dz1:.4f}")
# dL/dw1 = dL/dz1 × dz1/dw1 = dL/dz1 × x
dL_dw1 = dL_dz1 * x
print(f"dL/dw1 = dL/dz1 × x = {dL_dz1:.4f} × {x} = {dL_dw1:.4f}")
# dL/db1 = dL/dz1 × dz1/db1 = dL/dz1 × 1
dL_db1 = dL_dz1 * 1
print(f"dL/db1 = dL/dz1 × 1 = {dL_db1:.4f}")
勾配でパラメータを更新する
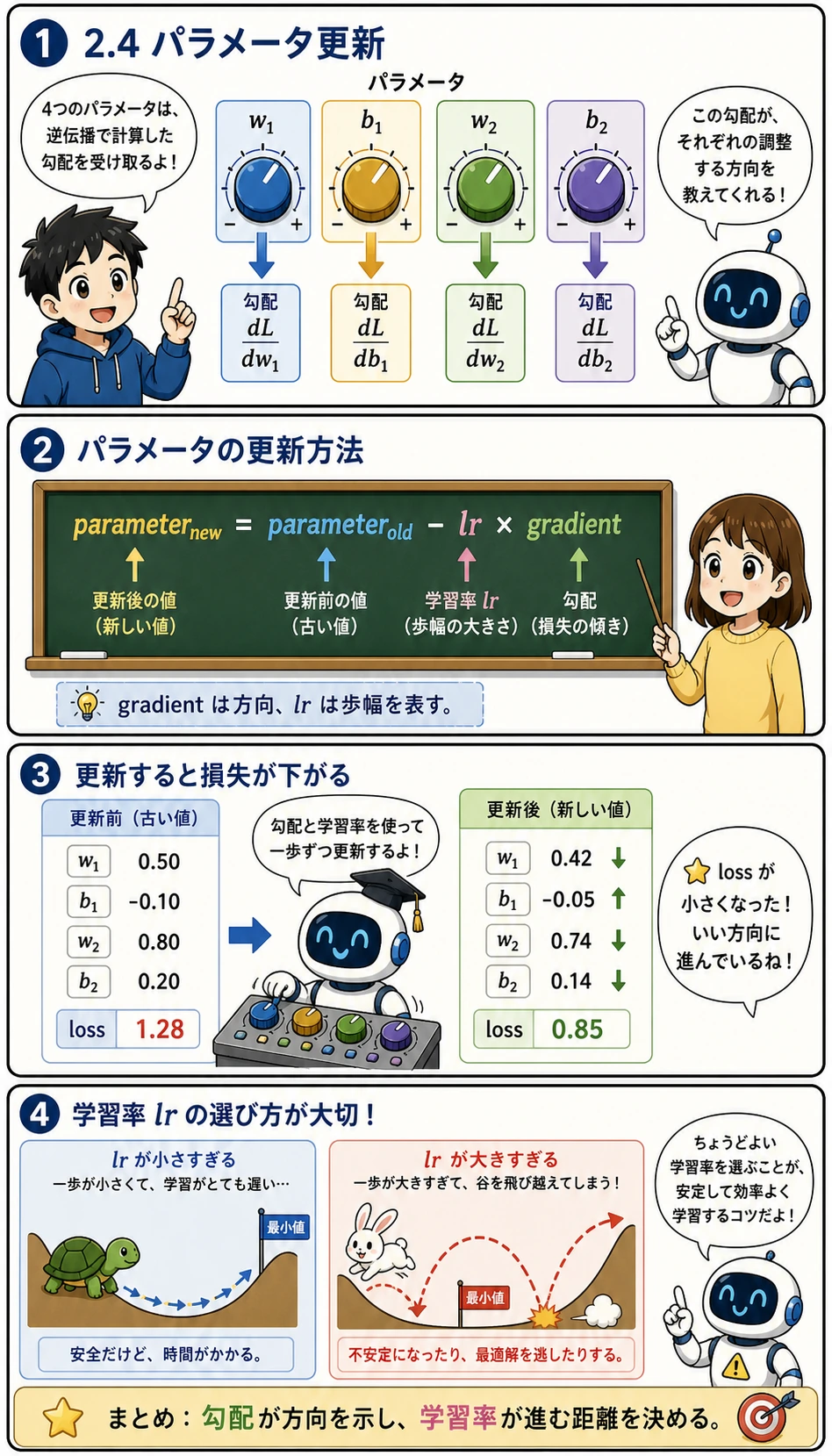
逆伝播で得られる勾配は、最終目的ではありません。勾配は「パラメータをどう動かせばよいか」を教える指示です。
更新式は次の通りです。
新しいパラメータ = 古いパラメータ - 学習率 × 勾配
lr は learning rate(学習率) の略で、1回の更新でどれだけ大きく動くかを決めます。lr が小さすぎると学習は遅くなり、大きすぎるとよい場所を飛び越えて損失が悪化することがあります。
lr = 0.1
print(f"\n=== パラメータ更新 (lr={lr}) ===")
print(f"w1: {w1:.4f} → {w1 - lr * dL_dw1:.4f}")
print(f"b1: {b1:.4f} → {b1 - lr * dL_db1:.4f}")
print(f"w2: {w2:.4f} → {w2 - lr * dL_dw2:.4f}")
print(f"b2: {b2:.4f} → {b2 - lr * dL_db2:.4f}")
# 更新
w1 -= lr * dL_dw1
b1 -= lr * dL_db1
w2 -= lr * dL_dw2
b2 -= lr * dL_db2
# 損失が小さくなったか確認
z1_new = w1 * x + b1
h_new = max(0, z1_new)
y_new = w2 * h_new + b2
loss_new = (y_new - target) ** 2
print(f"\n損失の変化: {loss:.4f} → {loss_new:.4f} ({'↓ 小さくなった!' if loss_new < loss else '↑ 大きくなった'})")
計算グラフ——逆伝播のデータ構造
計算グラフとは?
計算グラフ = 各計算ステップをノードとして表した有向グラフ。
順伝播:矢印の方向に沿って、入力から損失まで計算する。
逆伝播:矢印と逆向きに、損失から各パラメータの勾配を計算する。
なぜ計算グラフで急にわかりやすくなるのか?
それは、「複雑なネットワーク」を、たくさんの小さなノードに分けて見られるからです。
- 乗算
- 加算
- 活性化
- 損失
ネットワークをこれらのノードのつながりとして見ると、
逆伝播はもう魔法ではなく、次のように見えてきます。
- グラフに沿って勾配を1層ずつ戻していく
なぜ PyTorch に計算グラフが必要なのか?
# PyTorch では(第6ステージで詳しく学びます)
# import torch
#
# x = torch.tensor(2.0)
# w1 = torch.tensor(0.5, requires_grad=True)
# b1 = torch.tensor(0.1, requires_grad=True)
# w2 = torch.tensor(-0.3, requires_grad=True)
# b2 = torch.tensor(0.2, requires_grad=True)
#
# # 順伝播(PyTorch が自動で計算グラフを構築)
# h = torch.relu(w1 * x + b1)
# y = w2 * h + b2
# loss = (y - 1.0) ** 2
#
# # 逆伝播(1行で、すべての勾配を自動計算!)
# loss.backward()
#
# print(w1.grad) # dL/dw1
# print(b1.grad) # dL/db1
# print(w2.grad) # dL/dw2
# print(b2.grad) # dL/db2
PyTorch は順伝播のときに各操作を自動で記録して計算グラフを作り、loss.backward() でそのグラフを逆向きにたどって、連鎖律を使いながら各パラメータの勾配を自動で計算します。
手で 4 個のパラメータの勾配を計算するだけでも大変です。GPT-3 には 1750億個のパラメータがあります。これを手計算することはできません。PyTorch の自動微分エンジン(autograd)を使えば、順伝播のコードを書くことだけに集中でき、勾配計算は完全に自動化されます。
完全な例:小さなネットワークを学習する
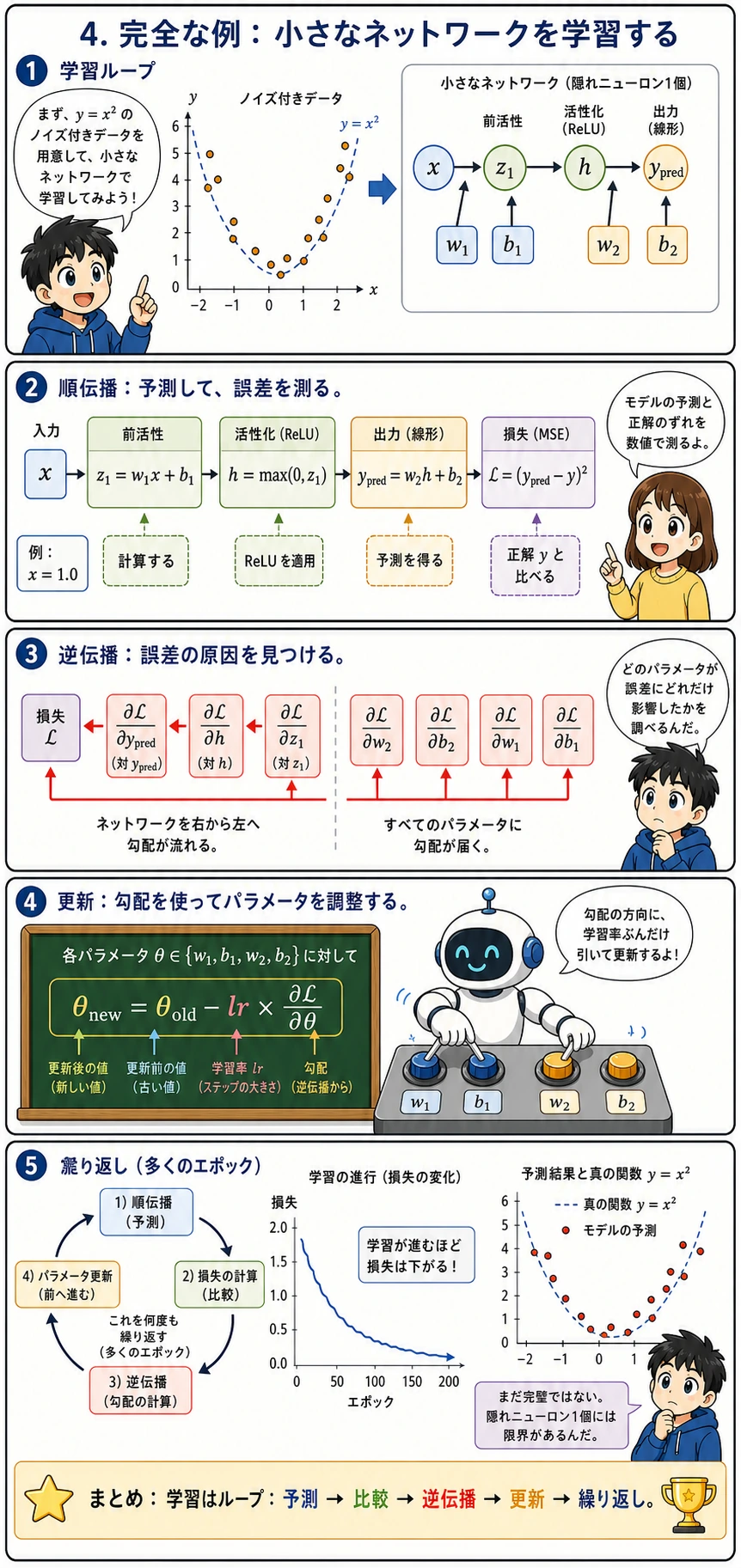
順伝播 + 逆伝播 + パラメータ更新をまとめて、2層ネットワークを学習してみましょう。
この完全な例は、AI の学習ループの最小版です。
- データを1点読む
- 順伝播で予測する
- 損失を計算する
- 逆伝播で勾配を計算する
- パラメータを更新し、これを多くの
epochで繰り返す
epoch は、訓練データ全体を1回見終えることを意味します。losses は、学習が全体としてよい方向に進んでいるかを記録するリストです。
import numpy as np
import matplotlib.pyplot as plt
# データ
rng = np.random.default_rng(seed=42)
X_data = rng.uniform(-2, 2, 50)
y_data = X_data ** 2 + rng.normal(size=50) * 0.3 # y = x² + ノイズ
# 2層ネットワークのパラメータ
w1 = rng.normal()
b1 = 0.0
w2 = rng.normal()
b2 = 0.0
lr = 0.01
losses = []
for epoch in range(500):
total_loss = 0
for x, target in zip(X_data, y_data):
# === 順伝播 ===
z1 = w1 * x + b1
h = max(0, z1)
y_pred = w2 * h + b2
loss = (y_pred - target) ** 2
total_loss += loss
# === 逆伝播 ===
dL_dy = 2 * (y_pred - target)
dL_dw2 = dL_dy * h
dL_db2 = dL_dy
dL_dh = dL_dy * w2
dL_dz1 = dL_dh * (1.0 if z1 > 0 else 0.0)
dL_dw1 = dL_dz1 * x
dL_db1 = dL_dz1
# === パラメータ更新 ===
w1 -= lr * dL_dw1
b1 -= lr * dL_db1
w2 -= lr * dL_dw2
b2 -= lr * dL_db2
losses.append(total_loss / len(X_data))
if epoch % 100 == 0:
print(f"Epoch {epoch}: loss = {losses[-1]:.4f}")
# 可視化
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
axes[0].plot(losses, color='coral', linewidth=2)
axes[0].set_xlabel('Epoch')
axes[0].set_ylabel('Loss')
axes[0].set_title('学習損失')
axes[0].grid(True, alpha=0.3)
x_test = np.linspace(-2, 2, 200)
y_pred_test = []
for x in x_test:
z1 = w1 * x + b1
h = max(0, z1)
y_pred_test.append(w2 * h + b2)
axes[1].scatter(X_data, y_data, alpha=0.4, s=20, color='gray', label='データ')
axes[1].plot(x_test, x_test**2, 'g--', linewidth=2, label='y = x²(真の値)')
axes[1].plot(x_test, y_pred_test, 'r-', linewidth=2, label='ネットワーク予測')
axes[1].set_title('近似結果(2層ネットワーク、隠れニューロン1個)')
axes[1].legend()
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
このネットワークは隠れニューロンが1個しかありません(本質的には区分線形関数です)。そのため、x² を完全に近似するのは難しいです。ニューロンを増やせば、もっとよく近似できます。これが第6ステージで学ぶ内容です。
まとめ
| 概念 | 直感 |
|---|---|
| 連鎖律 | 複合関数の導関数 = 各層の導関数の積 |
| 順伝播 | 入力から損失まで、順に計算する |
| 逆伝播 | 損失からパラメータへ、順に勾配を計算する |
| 計算グラフ | 計算手順を記録し、自動微分を可能にする |
| 自動微分 | PyTorch がすべての勾配を自動で計算してくれる |
この節で一番持ち帰ってほしいこと
- 連鎖律の最重要の直感は、「変化は多層構造を通って1層ずつ伝わる」ということ
- 逆伝播の最重要の直感は、「損失から始めて、勾配を1層ずつ戻す」ということ
- 計算グラフの最重要の価値は、この流れを記録でき、自動化できる形にしてくれること
微積分の3つのレッスン + この節で、あなたは次を学びました。
- 導関数:変化の速さ、最適化の方向
- 偏導関数と勾配:多変数のときの方向、最も増える方向を指す
- 勾配降下法:AI 学習の核心——負の勾配方向へ少しずつ進む
- 連鎖律と逆伝播:各パラメータの勾配を効率よく計算する
🔖 第4ステージ完了!
これで、AI に必要な3つの大きな数学基礎を身につけました。
- 線形代数:ベクトル、行列、固有値——データの表現と変換
- 確率統計:確率分布、ベイズ、MLE——不確実性と損失関数
- 微積分:導関数、勾配、勾配降下法——モデルがどう学ぶか
🔀 次のステップ:第5ステージ・機械学習へ進み、これらの数学ツールを実際の機械学習アルゴリズムに使っていきましょう。
実践練習
練習1:連鎖律を手計算する
y = (2x + 1)³ について、連鎖律を使って dy/dx を求め、x=1 で確認してください。
練習2:ネットワークを拡張する
第4節の2層ネットワークを、隠れニューロンが3個ある形に変更してください(w1 を3つの重みにする)。順伝播と逆伝播のコードを手で書いてみましょう。
練習3:手計算と自動計算を比べる
もし PyTorch をすでにインストールしているなら、torch.autograd を使って第2節のすべてのパラメータの勾配を計算し、手計算の結果と比べてみましょう。
import torch が失敗する場合は、先に PyTorch をインストールしてください。CPU または macOS の簡単な環境なら、通常は次で動きます。
python -m pip install --upgrade torch
import torch
x = torch.tensor(2.0)
w1 = torch.tensor(0.5, requires_grad=True)
b1 = torch.tensor(0.1, requires_grad=True)
w2 = torch.tensor(-0.3, requires_grad=True)
b2 = torch.tensor(0.2, requires_grad=True)
h = torch.relu(w1 * x + b1)
y = w2 * h + b2
loss = (y - 1.0) ** 2
loss.backward()
print("loss =", loss.item())
print("w1.grad =", w1.grad.item())
print("b1.grad =", b1.grad.item())
print("w2.grad =", w2.grad.item())
print("b2.grad =", b2.grad.item())