语义分割
分类回答的是:
- 这张图是什么
检测回答的是:
- 图里有什么、它在哪
语义分割再进一步回答:
图里的每个像素属于什么类别。
这让视觉理解进入更细粒度层面。
学习目标
- 理解语义分割和分类/检测的区别
- 理解分割 mask 为什么更细粒度
- 通过可运行示例理解像素级标签和 IoU
- 建立语义分割的基本任务直觉
先建立一张地图
如果你刚学完分类和检测,可以先把这节理解成:
- 分类只给整图一个答案
- 检测给每个目标一个框
- 分割开始给每个像素一个类别
所以这一节真正新增的核心是:
- 输出粒度变得最细
- 评估也更细
- 模型是否“看懂边界”开始非常重要
语义分割最适合新人的理解顺序是:
这节最重要的不是先记网络名,而是先知道:
- 分割为什么比检测更细
- mask 为什么是核心表示
一个更适合新人的总类比
如果把分类、检测、分割放在一起看,可以这样理解:
- 分类像在回答:“这张照片主要拍了什么?”
- 检测像在回答:“画面里有哪些对象,它们大概在哪?”
- 分割像在回答:“把整张图像拿来涂色,每个像素都要决定属于谁。”
这样一来,分割为什么更难就会一下子清楚很多:
- 它不是只给一个答案
- 也不是只画几个框
- 它要对整张图的每一块区域都负责
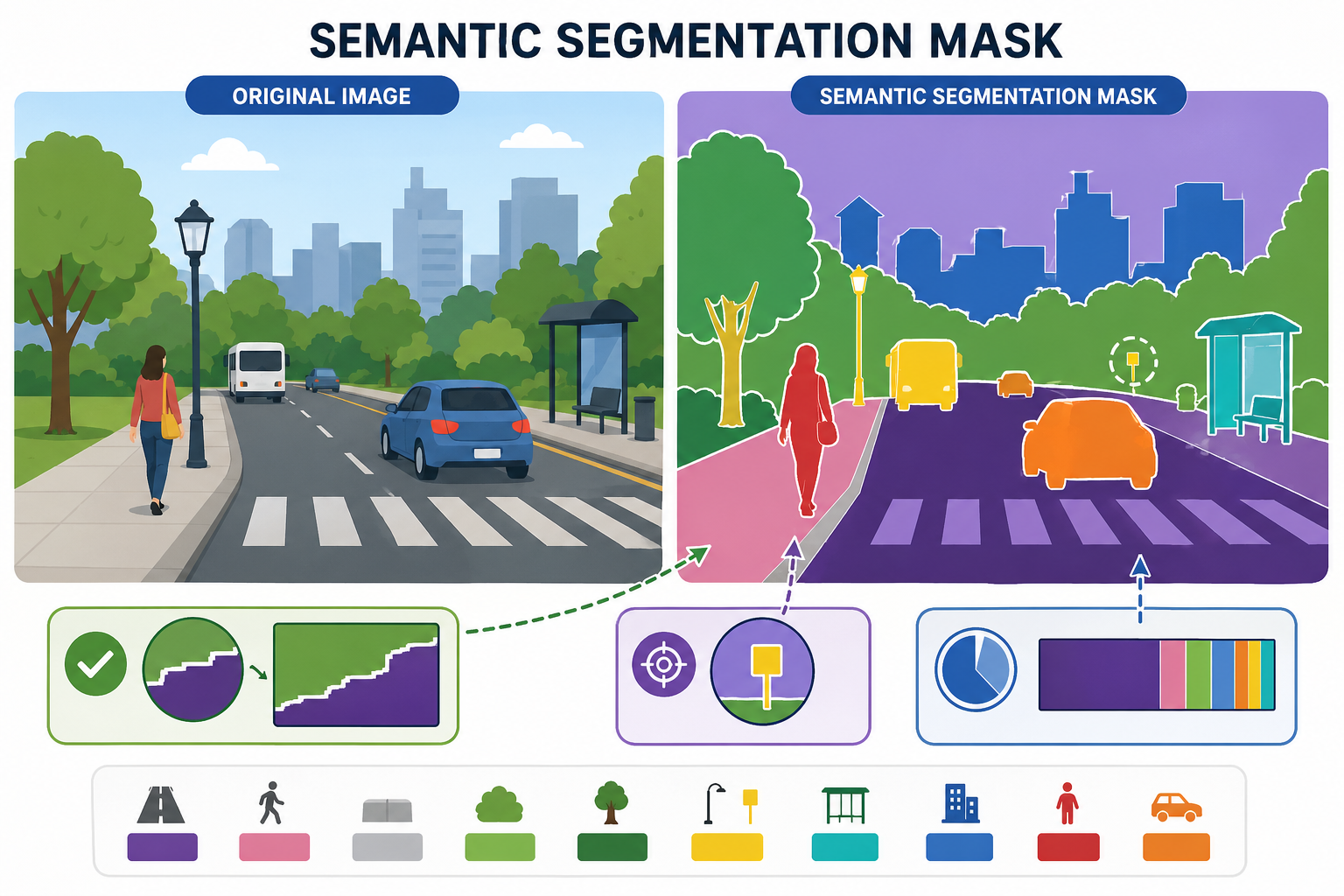
一、语义分割到底在做什么?
它的目标是:
- 给图像中每个像素分一个类别
例如:
- 天空
- 路面
- 人
- 车
1.1 第一次学这节最该先记什么?
最值得先记住的是:
- 分类只给整图标签
- 检测给框
- 分割给区域
而且这个“区域”不是粗略提示,而是每个像素都有类别归属。
为什么它比检测更细?
因为检测只给框,
分割会更精确地给出区域边界。
1.2 为什么这节最值得先抓住“像素级”这件事?
因为从这一节开始,视觉任务不再只是:
- 找对象
- 给框
而是开始回答:
- 这一片区域到底属于什么
- 这个边界到底画得准不准
所以语义分割可以先简单理解成:
把整张图变成一张“每个像素都有语义标签”的地图。
二、先跑一个最小分割 mask 示例
pred_mask = [
[0, 0, 1],
[0, 1, 1],
[0, 0, 1],
]
gt_mask = [
[0, 0, 1],
[0, 1, 1],
[0, 1, 1],
]
def iou_for_class(pred, gt, target_class):
inter = 0
union = 0
for pred_row, gt_row in zip(pred, gt):
for p, g in zip(pred_row, gt_row):
if p == target_class and g == target_class:
inter += 1
if p == target_class or g == target_class:
union += 1
return inter / union if union else 0.0
print("IoU for class 1:", round(iou_for_class(pred_mask, gt_mask, 1), 4))
2.1 这个例子最关键的直觉是什么?
分割评估不是看“整图对不对”,
而是看:
- 区域重叠得好不好
2.1.1 为什么分割里的 IoU 会比分类指标更有存在感?
因为在分割任务里:
- 预测类别对了还不够
- 区域要大致重合才算真的分对
这也是为什么你会经常看到:
- per-class IoU
- mIoU
而不是只看一个总体准确率。
这就是为什么 IoU 在分割里也非常重要。
2.2 新人第一次学分割,最该先记哪三件事?
- mask 是像素级标签图
- 分割评估比分类更关注区域重叠
- 小类别和边界区域往往最难
2.3 为什么分割项目里特别容易出现“看起来差不多,但指标差很多”?
因为只要边界区域错一点,或者小类别漏一片,
IoU 就可能掉得很明显。
这也是为什么分割任务特别适合训练新人建立一个意识:
视觉结果不是“看着像就行”,区域边界本身就是结果的一部分。
2.4 第一次学分割时,最容易低估什么?
最容易低估的是:
- 边界
- 小类别
- 类别不平衡
因为这些地方常常在可视化里只占一点点,
但对 IoU 和真实效果影响会很大。
2.5 再看一个最小“类别不平衡”示例
mask = [
[0, 0, 0, 0],
[0, 1, 1, 0],
[0, 0, 0, 0],
[0, 0, 0, 0],
]
def class_counts(mask):
counts = {}
for row in mask:
for value in row:
counts[value] = counts.get(value, 0) + 1
return counts
print(class_counts(mask))
这个例子虽然很小,但能一下子帮新人看懂一个现实问题:
- 背景像素经常特别多
- 真正重要的小类别却只占很少一部分
所以分割项目里,如果你只盯总体像素准确率,很容易被“背景全都判对了”这件事误导。
三、最容易踩的坑
3.1 边界不准
分割模型很容易在物体边缘出错。
3.2 类别极度不平衡
背景往往太多,
小目标类别很容易被忽略。
3.3 只看总体��像素准确率
像素准确率高,不代表小类别真的分得好。
3.4 只看彩色可视化,不做失败分桶
很多新人第一次做分割时,会贴几张好看的 mask 图就结束。
但真正能推动项目进步的,通常是把失败样本分成:
- 边界错
- 小类别漏掉
- 类别混淆
- 标注本身有争议
只有这样,你才知道下一步该改:
- 数据
- 损失函数
- 采样策略
- 还是模型结构
四、学这一节时最正确的预期
这一节最重要的不是今天就学会复杂分割模型,
而是先真正看清:
- 分割比检测更细粒度
- 分割结果通常更依赖区域级指标
- 小类别和边界误差会极大影响真实效果
第一次做语义分割项目时,最稳的顺序
更建议这样做:
- 先把类别定义收窄
- 再统一 mask 标注标准
- 先做一个最小 baseline
- 再看 per-class IoU 和失败样本
这样会比一开始就追复杂网络更容易把项目做清楚。
如果把它做成项目,最值得展示什么
- 原图
- 预测 mask
- GT mask
- per-class IoU
- 失败样本里的边界对比
这样会比只贴一张“彩色 mask 图”更像真正项目。
小结
这节最重要的是建立一个判断:
语义分割是在做像素级分类,因此它比分类和检测都更细粒度,也更依赖区域级评估。
这节最该带走什么
- 分割的核心对象是 mask,不是整图标签也不是框
- IoU 在分割里不是配角,而是核心评估视角
- 边界和类别不��平衡是分割任务的常见难点
如果再压成一句话,那就是:
语义分割是在做像素级语义地图,因此它真正关心的不只是“有没有识别到”,还要看“区域边界有没有画对”。
练习
- 自己改一组
pred_mask,观察 IoU 会怎么变。 - 为什么像素准确率高,不一定说明分割模型真的好?
- 语义分割和目标检测最大的差别是什么?
- 如果类别非常不平衡,你最担心什么问题?